|
|
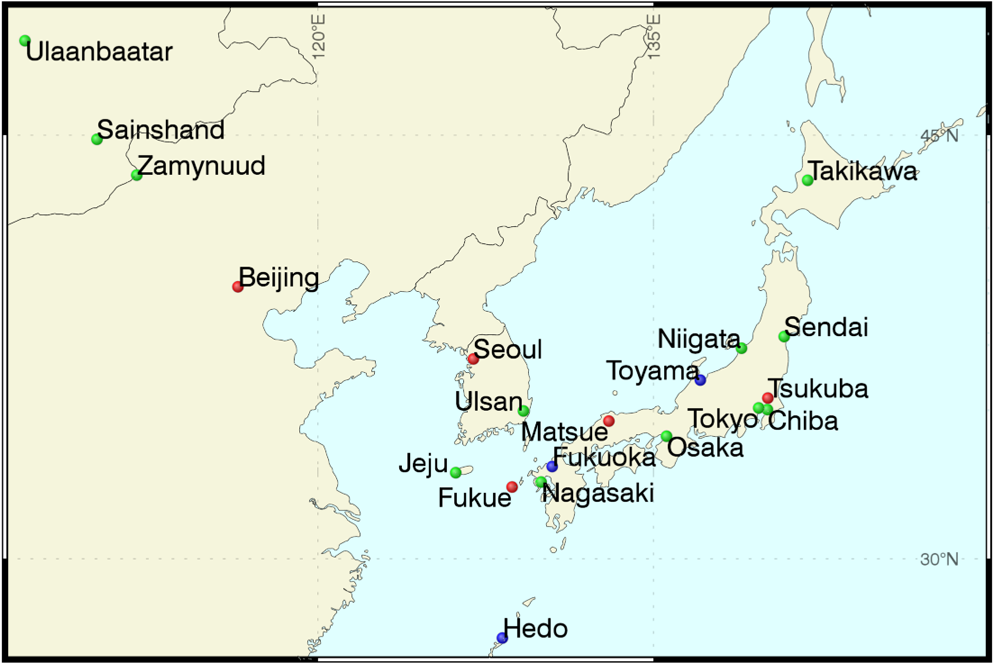
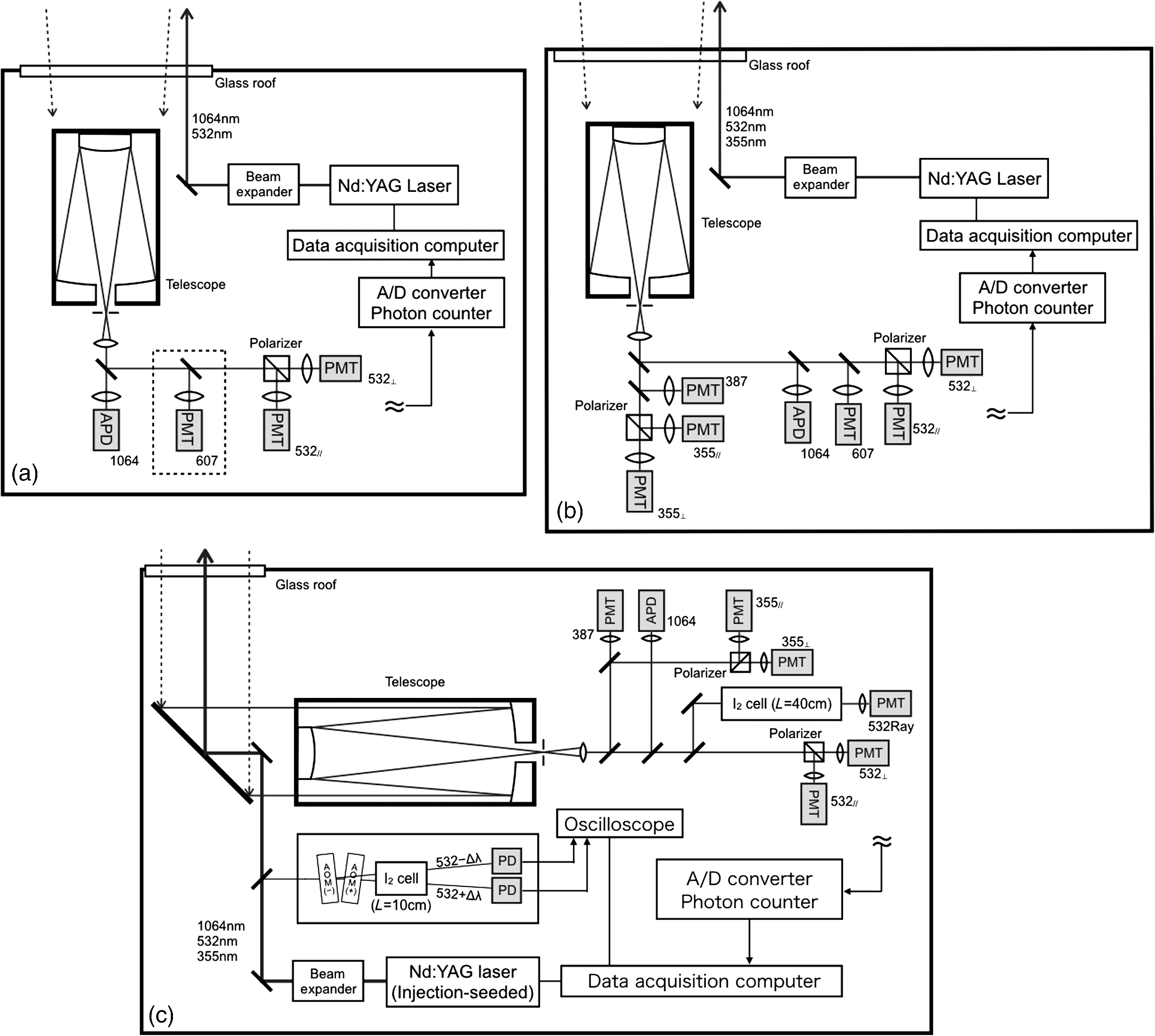
1.IntroductionAerosols, i.e., particulate matter (PM) in the atmosphere, play a key role in radiation transfer in the Earth system. Aerosols scatter or absorb sunlight, thereby cooling or heating atmospheric layers. Individual aerosol particles also act as condensation nuclei or ice nuclei in the troposphere. Therefore, knowledge of the location and optical properties of aerosols is crucial for understanding the thermal balance of the atmosphere.1 In addition, PM near the Earth’s surface is a known risk factor for human health. The International Agency for Research on Cancer has classified PM as a high-level risk factor for lung cancer and other cancers.2 Thus, PM near the Earth’s surface is one of the most important properties of the ambient atmospheric environment that should be monitored. The most powerful remote sensing technique to determine the vertical distribution of an aerosol layer in near real time is light detection and ranging (lidar). Although a precipitation radar can cover a horizontal area several hundred kilometers in diameter, lidar can measure the aerosol distribution just above the lidar instrument, or of around several kilometers, even if the lidar instrument has a horizontal scanning mechanism. Thus, to understand the three-dimensional distribution of aerosols on a regional scale, a lidar network is indispensable. Several lidar networks have already been constructed. For example, the European Aerosol Research Lidar Network (EARLINET), which has stations in Europe, was established in 2000.3 Lidars in EARLINET are organized to observe atmosphere in the region synchronously, and their data quality is assured for research activities related to the radiative forcing. In East Asia, the National Institute for Environmental Studies (NIES), Japan, has developed a network of lidar instruments called Asian dust and aerosol lidar observation network (AD-Net), which is a collaborative project of many universities, institutes, and national and local governments. Although AD-Net was initially established to monitor the transportation of Asian dust, anthropogenic particles are another important target in these days. Micropulse Lidar Network (MPLNET)4 led by NASA (National Aeronautics and Space Administration) has the widest geographical distribution of lidars in the world, from the equatorial to the polar regions, and has a close relation to AERONET (NASA Aerosol Robotic Network). Latin American Lidar Network (LALINET aka ALINE)5 was established to study the climatology of aerosols and is also devoted to the early warning of volcanic eruptions. Although each network has its original strategy fitting technical bases and location, these lidar networks contribute to GALION (GAW Aerosol Lidar Observation Network) for monitoring of the atmospheric conditions around the globe. In this paper, we describe the historical and current status of AD-Net along with the hardware specifications of the lidar systems and the data processing method, and we present examples of the application of lidar data. We also introduce the new generation of lidar equipment and techniques used in AD-Net. Finally, we review the future outlook of this ground-based lidar network. 2.Elastic-Scattering Lidar in AD-Net2.1.History of AD-Net and Station LocationsIn 1996, NIES, in Tsukuba, Japan, developed an automated elastic scattering lidar (EL) system that could operate continuously without human intervention. At that time, only the total backscatter signal intensity at 532 nm () was recorded, and only aerosols and cloud layers could be identified. In 1999, the system was modified so that the polarization state of the backscattered light could also be recorded, allowing aerosol particle shapes to be investigated. By this modification, the NIES automated lidar system acquired the capability to distinguish mineral dust particles from anthropogenic particles and ice particles in cirrus clouds from water droplets in convective clouds. In 2001, an initial lidar network was constructed for the ACE-Asia campaign,6 an important aim of which was to investigate the distribution of Asian dust. For ACE-Asia, NIES operated lidar observatories at Tsukuba, Nagasaki, and Beijing and collaborated with other lidar observatories in Japan.7,8 Since then, the number of NIES-type lidar observatories, which follow a mostly uniform operational strategy, has increased; at present, AD-Net comprises a total of 20 observatories in East Asia (i.e., in Japan, Korea, China, and Mongolia). Figure 1 shows the locations of AD-Net lidar observatories in operation as of July 2016. Nowadays some lidars were modified to Raman lidar (RL) or multiwavelength Raman lidar (MRL) systems (see Sec. 3). However, the data treatment for elastic scattering channels of such lidars is the same as that for EL. Thus, we describe EL system at first (Sec. 2.2) and then introduce the common data processing procedures on elastic scattering channels in Sec. 2.3. 2.2.Hardware of an Elastic-Scattering Lidar SystemThe fundamental and common information about aerosol is retrieved from elastic scattering channels in all types of AD-Net lidars. Here, the specifications and configuration of the AD-Net elastic lidar (EL) system are described. Table 1 and Fig. 2(a) summarize the specs and configurations of EL. The EL employs a flashlamp-pumped Q-switching Nd:YAG laser as the light source. Pulsed light is emitted with a fundamental wavelength of 1064 nm and a second harmonic of 532 nm, produced by second harmonics generation. A pulse with a mean power of 50 mJ (sum of 20 mJ at 1064 nm and 30 mJ at 532 nm) and a duration of 8 ns is expanded by a beam expander and emitted at a frequency of 10 Hz in the direction of the zenith. Backscattered light from the atmosphere is collected by a Schmidt–Cassegrain telescope with a diameter of 20 cm and a field of view of 1 mrad and separated by a dichroic mirror into (light intensity at 1064 nm) and (light intensity at 532 nm). Then, is further separated by a beam splitter cube into two components: (the polarizing angle is parallel to that of the emitted laser beam) and (the polarizing angle is perpendicular). The extinction ratio of the beam splitter cube is 0.001. and are both detected by photomultiplier tubes (PMTs), and is detected by an avalanche photodiode. Signal intensities are sampled at 25 MHz (corresponding to a range resolution of 6 m), digitized with 12- or 16-bit AD converters, and recorded by a personal computer as vertical profiles , , and , where denotes the altitude above the lidar. To obtain a high signal-to-noise ratio, signals are accumulated for 5 min (i.e., 3000 laser shots). To reduce the flashlamp consumption, a 10-min rest period follows each 5-min emission period. Thus, the system obtains four profiles each hour. Table 1Specifications of the AD-Net lidars.
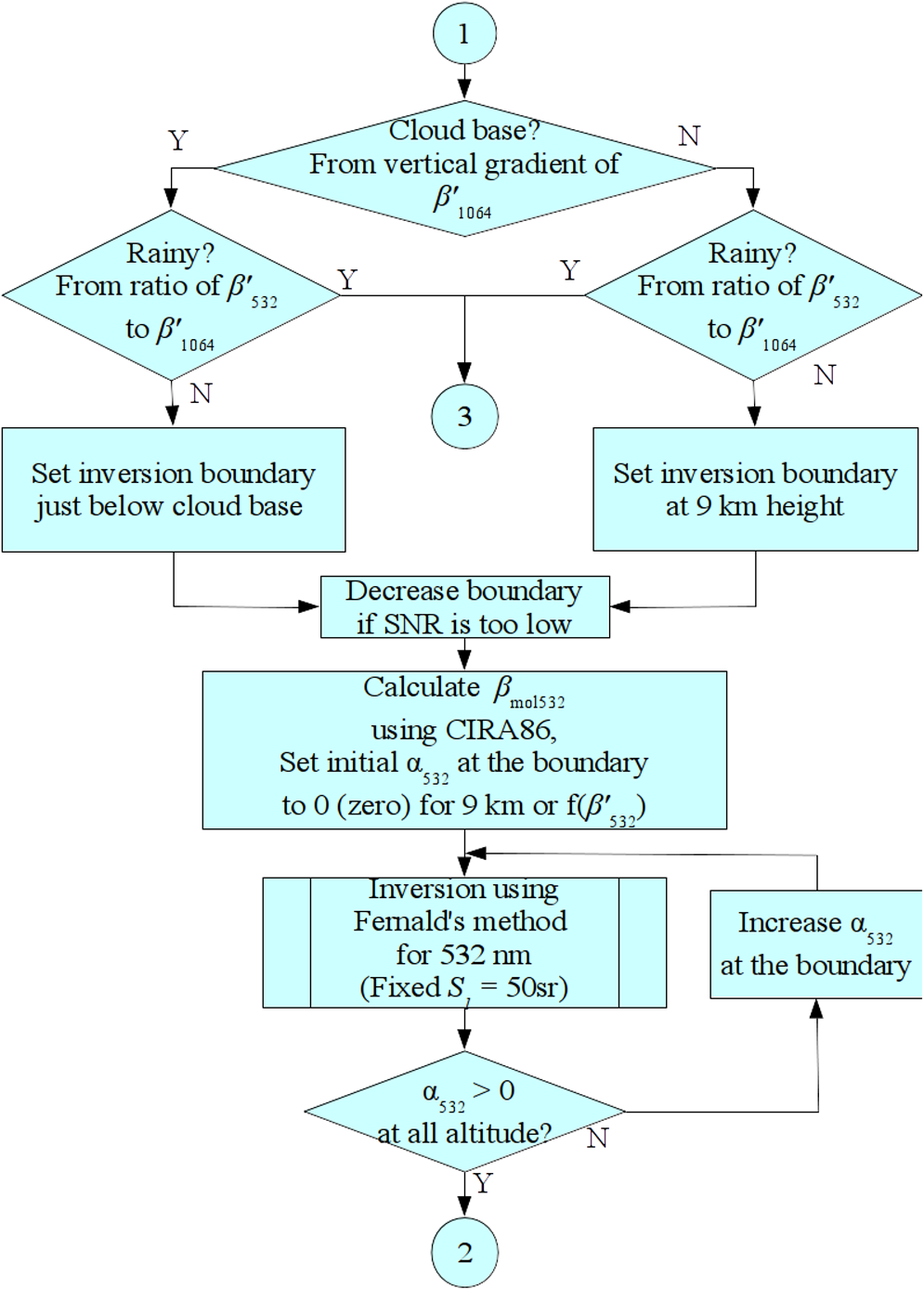
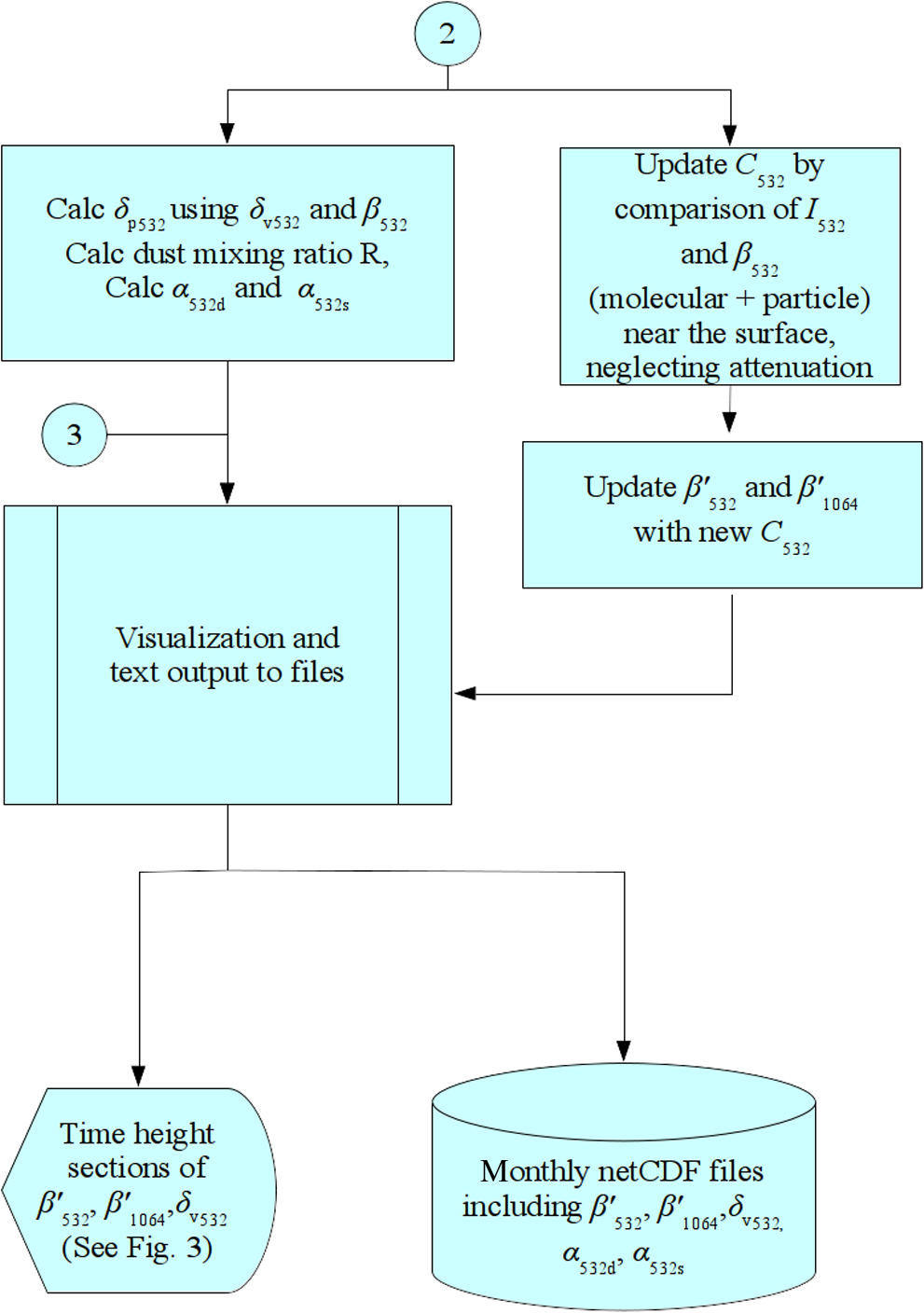
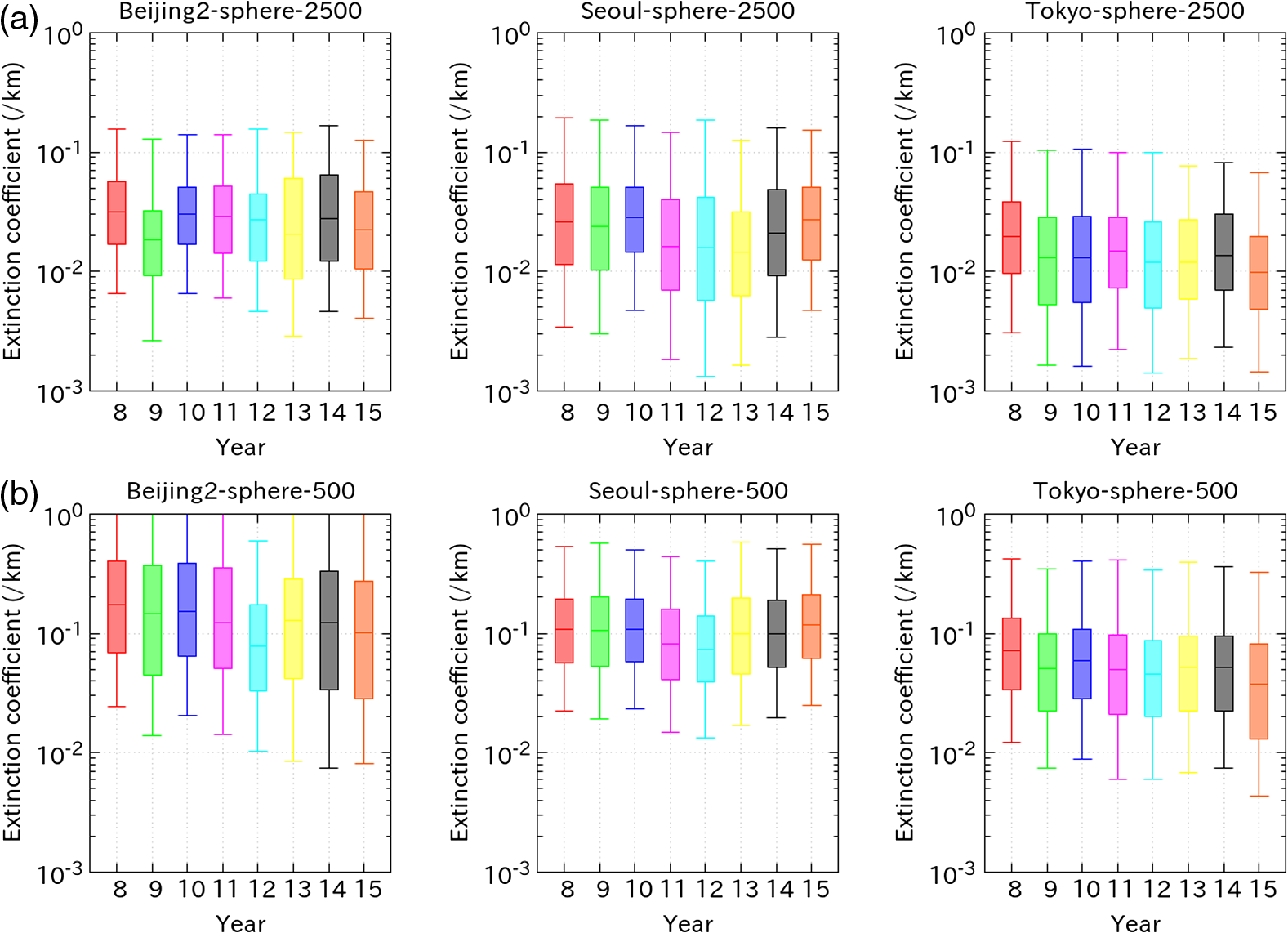
The lidar system is installed in a room with a glass window in the roof. Because the observations are made through the glass, the system can be operated in all weather conditions, including rain and snow. Every hour, the observation results are transferred to an NIES data server via the Internet, the condition of the lidar system is checked, and an initial analysis is performed. An exception is the Beijing lidar, which by Chinese law is not allowed to send data to NIES in real time. 2.3.Data ProcessingTo obtain the optical properties of aerosols, the following analyses are applied to the AD-Net observation results in elastic-scattering channels of EL, RL, and MRL. The background removed and range corrected signal intensities of the three channels (, , and ) must be calibrated before physical quantities such as the attenuated backscatter coefficient can be determined. First, total backscatter intensity is calculated as where Cd is the ratio of sensitivities between the two PMTs used to detect the parallel and perpendicular components (see Sec. 2.2). Once has been obtained, a frequency histogram of all in the height range of 1200 to 6000 m is constructed. The histogram peak corresponds empirically to the system calibration constant () because the molecular backscatter is dominant in this height range with lighter aerosol loading conditions. Then, the attenuated backscatter coefficient at 532 nm () is estimated as the product of and , and the volume linear depolarization ratio (), defined as is also calculated. Next, the intensity of the 1064 nm signal is calibrated using the ratio of sensitivities at and . Near the bottom of water clouds, the backscatter coefficient does not have a strong dependency on wavelength because the scatterers are large (radius is usually ) compared with the wavelength of the laser light. Thus, the calibration constant for 1064 nm () can be determined from and . In this calculation, we ignore the difference in aerosol optical depth at 532 and 1064 nm between the surface and the cloud base because the aerosol loading is not expected to be very high in that interval. Once has been determined, the attenuated backscatter coefficient at 1064 nm () is calculated as the product of and . , , and are each averaged over five vertical points to increase the signal-to-noise ratio (which reduces the height resolution to 30 m). Examples of time–height sections of these quantities are shown in Fig. 3, and the calibration procedure is summarized in Fig. 4.Fig. 3Examples of time–height sections of (a) attenuated backscatter coefficient at 532 nm (), (b) attenuated backscatter coefficient at 1064 nm (), and (c) volume depolarization ratio at 532 nm () and with cloud/rain detection results, (d) dust extinction coefficient at 532 nm () and (e) spherical particle extinction coefficient at 532 nm (). The observations were made at Osaka in March 2016. The height range for (a)–(c) is from the surface to 18 km and for (d) and (e) is from the surface to 9 km. Black areas in (d) and (e) indicate cloud layers, and gray areas indicate regions above clouds, rain or snow, or no observation data.  Fig. 4Flowchart of the backscattering intensities at 532 nm () and at 1064 nm () calibration procedures. 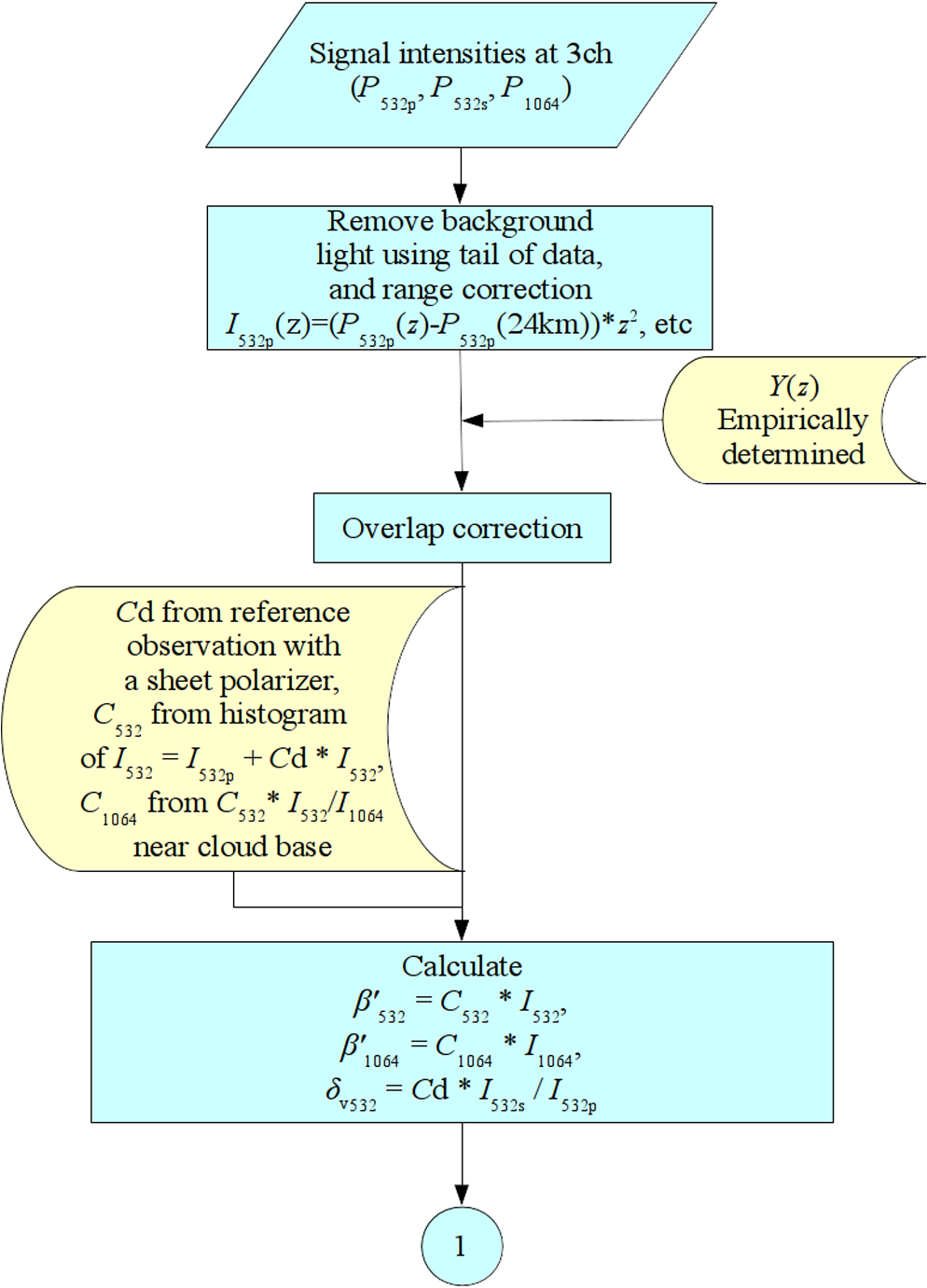 The depolarization ratio, a measure of the irregularity of the scatterer shape,9 is the most important property of Asian dust measured by lidar systems. To calculate the depolarization ratio, it is important to first calibrate the signal intensities of the and channels. In AD-Net, the difference in sensitivity between the two PMTs used to detect these components is checked routinely by the following method. A sheet polarizer whose polarizing direction is set at 45 deg to the polarizing plane of emitted light is inserted in front of the beam splitter cube, and the backscatter signal from the sky is recorded as a reference signal. In this reference record, the light intensities of the two channels are equal after the sheet polarizer, so the calibration constant can be obtained by comparing the recorded values of and . Next, the sheet polarizer is rotated 90 deg to set the polarizing angle at , and another reference signal is recorded. This pair of reference signals reduces any error caused by poor positioning of the sheet polarizer.10 The reference signals are usually recorded once per year for each lidar. The cloud base height must be determined first because the aerosol layer analysis cannot be applied to cloud layers. In AD-Net, the cloud base height is determined from the vertical gradient of and the peak value of between the cloud base and the apparent cloud top, where is equal to that of the cloud base. The threshold values are determined empirically because they depend on the vertical resolution and signal accumulation time of the lidar measurements and there are no true cloud base height reference data with equivalent lidar time and height resolutions at each observatory. Therefore, the thresholds are determined subjectively by estimating the cloud distribution on time–height sections [see Figs. 3(d) and 3(e)]. Scattering by rain droplets or snowflakes obscures the signal from aerosols. Thus, data recorded during rainy or snowy conditions must be eliminated before the analysis. Moreover, the affected profiles must be selected using the lidar data without ancillary data because not all observatories have a surface rain gauge or an equivalent rain or snow detection system. AD-Net uses the color ratio (, the ratio of to ) to distinguish rainy and clear (no rain) regions. Large droplets have a large value, so once exceeds a threshold (1.1) over a certain vertical interval in the lower atmosphere, the profile is classified as a rain or snow profile and not used for further analysis of aerosols. At present, in the AD-Net lidar systems, the overlap of the laser beam and the field of view of the telescope is insufficient for near-field observation. Typically, the full overlap is achieved at around 500 to 600 m altitude. The compensation function is therefore inferred from vertical profiles obtained on a day when the planetary boundary layer (PBL) is well developed, when the aerosol distribution is expected to be homogeneous near the surface. is determined such that the slope of the compensated signal is constant near the surface. is redetermined after routine maintenance of the lidar equipment is carried out. With this compensation, the optical properties are provided above 120 m altitude. Recently, a small telescope with a wide field of view has been deployed at several lidar observatories in AD-Net, allowing the signal to be measured near the ground (above 60 m altitude). At these observatories, can be determined without assuming homogeneous mixing near the surface. The lidar equation for elastic scattering is resolved into two components (particles and molecules) by the method described by Fernald.11 The ratio of the extinction coefficient to the backscatter coefficient for aerosols (lidar ratio, ) is assumed to be 50 sr. This value was initially determined from values reported in the literature on Asian dust because originally the main target of this lidar network was Asian dust. The vertical profile of molecular densities is obtained from the CIRA-86 global climatology of atmospheric parameters.12 Usually, the maximum height of Fernald’s inversion is set to an altitude of 9 km (6 km before 2012) if the signal-to-noise ratio within that interval is enough to solve the equation. Because 9 km is usually in the troposphere, where the aerosol extinction value is unknown, the lidar equation is first solved with the initial extinction value set to zero. If the resulting aerosol extinction value is negative anywhere between 0 and 9 km height, the extinction at 9 km is increased slightly and the lidar equation is solved again. Although this method is not rigorous, the obtained extinction is sometimes validated by independent measurements made near the surface or by columnar optical depth observations. Finally, the particulate depolarization ratio () is calculated from the volume depolarization ratio () and the particulate backscatter coefficient. These procedures are explained in detail in Ref. 7 and outlined in Fig. 5. In East Asia, the aerosols being analyzed are assumed to be an external mixture of two components. One component is mineral dust, mainly Asian dust that has been transported a long distance, which has a particulate depolarization ratio () of 35%.7 The other component consists of spherical particles and is assumed to be a mixture of sulfate, nitrate, organic carbon, elemental carbon particles, and sea-salt droplets. The of the latter component is zero because the particles are spherical and Mie scattering theory is applicable. The observed particulate extinction coefficient and particulate linear depolarization values are the linear combination of these two components. Thus, it is possible to use the observed to separate the total particulate extinction coefficient () into two components, the dust extinction coefficient () and the spherical particle extinction coefficient (), by calculating the optical dust mixing ratio () by following equation:13 See Figs. 3(d) and 3(e) for examples of time–height sections of and .Although was initially estimated from a histogram of all data, a more precise estimation is made after inversion. The time series at 600 m height is compared with the total backscatter coefficient (sum of molecular backscatter from CIRA-86 and particulate backscatter obtained by inversion) at 600 m height to evaluate the system calibration constant again. The revised is then utilized to estimate from . is similarly recalculated. Finally, the AD-Net server generates numerical files in netCDF format that contain time–height sections of , , , , , , and . Quantities below 120 m altitude are eliminated from published data because their reliability is not high owing to the uncertainty of the overlap correction function . Currently, files are generated hourly for the month and archived one per month. Symbols for two types of missing values ( for cloud layers and −999 for regions above clouds, with rainy or snowy conditions, or with no observations) are embedded into the , , and . Simultaneously, figures of time–height sections for these parameters are plotted and both the numerical files and the figures are uploaded onto the AD-Net web page every hour. The procedure is outlined in Fig. 6. 2.4.Validation of Dust Extinction and Comparison with Other InstrumentsIt is not a simple task to validate dust extinction coefficients obtained by lidar because this parameter cannot be obtained directly by other instruments. However, the surface mass concentration of particles consists mainly of mineral dust during periods with heavy loading of Asian dust. Thus, dust extinction near the surface can be compared with filter-sampled mass concentrations by making some assumptions about vertical mixing near the surface. This comparison was first done in Beijing, China.13 In Ref. 13, it is reported that the dust extinction coefficient retrieved by lidar is almost proportional to the mass concentration of total suspended particles. A similar comparison has been conducted at many stations in Japan during several Asian dust events.14 In addition, in Ref. 15, the iron concentration in daily PM2.5 samples is compared with the dust extinction coefficient. The results of all these comparisons suggest that dust extinction coefficients determined by lidar are usable as an index of surface dust loading. 2.5.Utilization of the Retrieved Optical Parameters2.5.1.Use with chemical transport modelsA typical use of dust and spherical extinction coefficients is to validate chemical transport models (CTMs). A CTM calculates the four-dimensional distribution of various chemical components (constituent gaseous species and particulates) using meteorological data, emission inventories, chemical reactions, and physical processes (transport, removal, etc.). AD-Net lidar data were first compared with a CTM called CFORS, developed by Kyushu University.7 To validate CTM results, lidar data should be separated into independent chemical components. Thus, the dust extinction coefficient is useful for validating dust processes in the model. The spherical extinction coefficient is compared with the total extinction due to sulfate, nitrate, organic carbon, elemental carbon, and sea salt.16,17 A more sophisticated application of lidar data is to incorporate them into the CTM by assimilation. Data assimilation is a technique for modifying the aerosol loading in the model in accordance with observed results. In Ref. 18, lidar dust extinction data were assimilated to correct the dust emission factor at the source region of Asian dust in the model. Once dust extinction data have been assimilated, the dust concentration at the surface (PM10) simulated by the model corresponded more realistically to that observed at several observatories in Japan. 2.5.2.Epidemiology of Asian dustTo study the health effects of PM, the mass concentration of particles is usually used as an exposure index. In Japan, environmental standards have been determined for both SPM (suspended PM and almost equivalent to PM615) and PM2.5. However, the chemical components of PM are more important for investigating the actual mechanism of the health effects of the particles. The dust extinction coefficient is suitable for studies of the epidemiology of Asian dust because it captures the quantity of dust continuously. The daily mean value near the surface has been utilized in several epidemiological studies in Japan, some of which found a correlation between health impact and the dust extinction coefficient.19–23 2.5.3.Climatology of aerosolsThe climatology of aerosols in East Asia can be derived from AD-Net data. Horizontal, seasonal, and interannual variations of extinction coefficients are calculated for each of the two components. In Fig. 7, mean vertical profiles of dust and spherical particle extinction coefficients are plotted. The exponential decrement with height is apparent in the dust extinction coefficient in most stations; however, a boundary layer structure is found at around 1.8 to 2.3 km in the spherical particle extinction coefficient for many stations. To depict horizontal, annual, and interannual variations of spherical particle extinction coefficients more clearly, the probability density of a time series at a certain height is examined by calculating the 5, 25, 50, 75, and 95 percentiles at the selected height and comparing the results among observatories or among months or years. Fig. 7Averaged vertical profiles of (a) dust extinction coefficient () during March to May in 2010 to 2015, and (b) spherical particles extinction coefficient () for all seasons in 2010 to 2015 at 16 stations.  The spatial distribution of extinction coefficients of spherical particles among observatories is shown in Fig. 8. An apparent gradient from west to east can be seen except for two stations in Mongolia, but this effect disappears at higher altitudes. Fig. 8Distribution of spherical particle extinction coefficients at (b) 500 m altitude and (a) 2500 m altitude among observatories. The boxes and the horizontal line show the 25 to 75 percentile range and the 50 percentile, respectively, and the whiskers show the 5 to 95 percentile range, based on all data collected during 2010 to 2015. 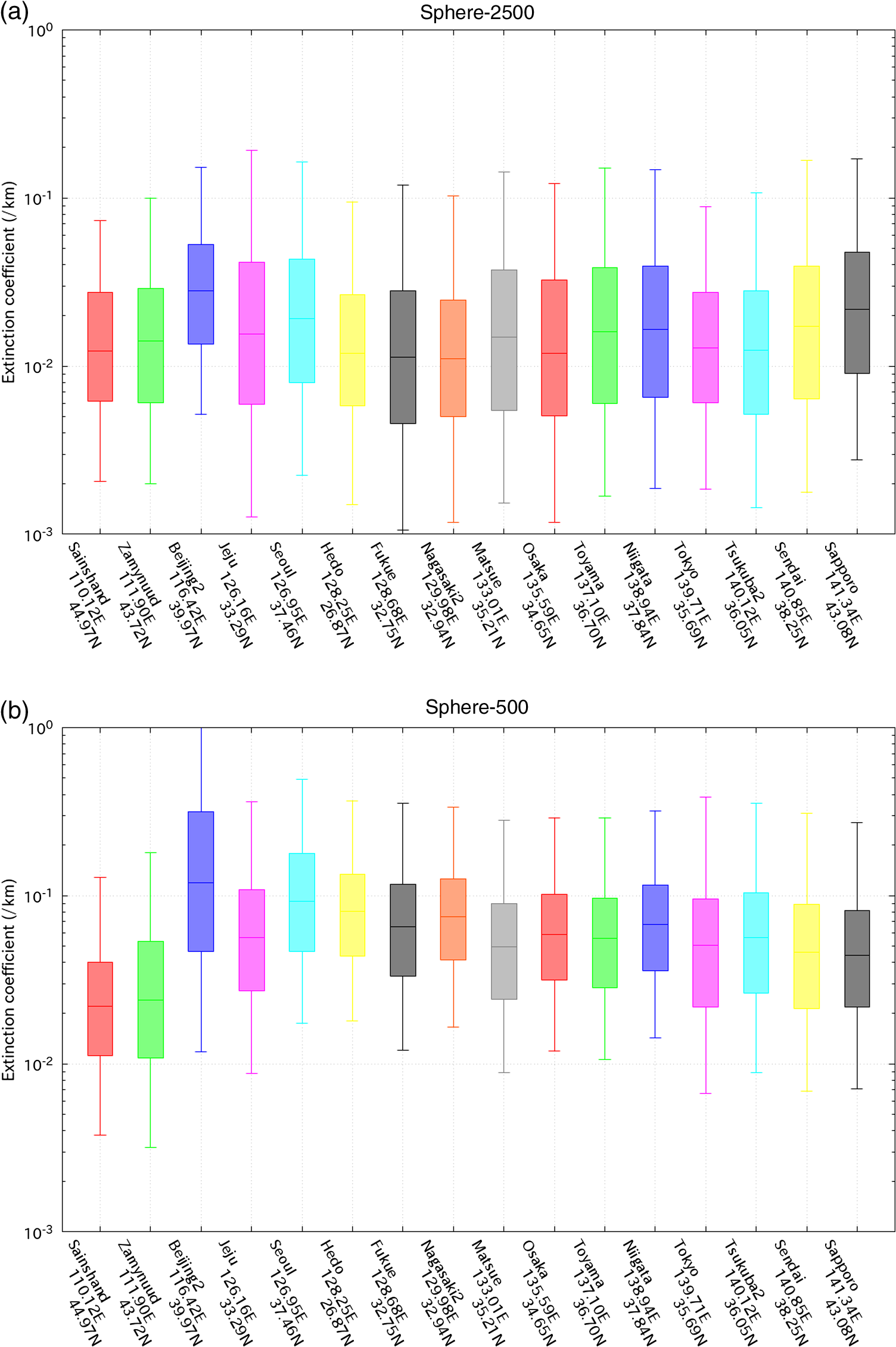 Intra-annual changes differ depending on altitude and among stations. Figure 9 shows monthly percentiles based on data from 2010 to 2015. In the PBL (500 m), seasonal changes are apparent in large cities (Beijing, Seoul, and Tokyo), whereas the annual cycle of changes is different in the lower troposphere (2500 m). These results are consistent with the findings of a comprehensive analysis of anthropogenic particles in this region.16 Fig. 9Same as Fig. 8 but showing monthly variations of the spherical extinction coefficient at (b) 500 m and (a) 2500 m at Beijing, Seoul, and Tokyo, from left to right.  has shown a slight interannual decrease in these cities from 2008 to 2015 (Fig. 10). These results confirm the findings of several studies that have reported a decrease in emissions of anthropogenic gaseous pollutants in this region since 2006.24 2.5.4.Qualitative analysis of internal mixtures using the color ratioThe backscatter signal at 532 nm obtained by AD-Net has been fully utilized for aerosol studies, as shown above. However, the signal at 1064 nm has so far been used in our procedures only to detect rainy and cloudy conditions. Thus, more direct use of the 1064-nm signal for aerosol analysis is a challenge for AD-Net. One example of the utilization of 1064 nm in aerosol studies is related to the internal mixture of dust and anthropogenic particles. If dust with high and values is mixed externally with anthropogenic particles with low and values, the observed and values should reflect the mixture. However, in the real atmosphere, observed and values sometimes do not correspond to the values expected for an external mixture. In some cases, lower and higher are detected. This implies that the mineral dust particles were chemically modified (e.g., partly deliquesced) and the shapes were modified to be more spherical during the transportation with anthropogenic particles. In such cases, it is possible that dust and anthropogenic particles have become internally mixed.25,26 3.Obtaining More Optical Parameters by Multichannel LidarWe have used ELs for a long time to monitor aerosols as well as clouds in East Asia and provided mineral dust and spherical aerosol extinctions as well as total aerosol optical properties and cloud base height from the lidar measurements. Lidar measurements with more channels enable providing more detailed information on aerosol optical and microphysical properties and more advanced classification of aerosol components. Thus, we introduced independent extinction measurement by RL and high spectral resolution (HSR) lidar techniques and its multiwavelength measurement to several main observation sites of the AD-Net. 3.1.Use of Raman Lidar TechniquesThe AD-Net uses the nitrogen RL technique. Details on the RL system, data analysis method, calibration method, measurement uncertainties, and observation results are given in Ref. 27. Here, a summary on the RL observation of AD-Net is given. We improved the ELs at five sites of the AD-Net (Tsukuba, Matsue, Fukue, Seoul, and Beijing) by adding a nitrogen Raman scatter measurement channel at 607 nm and have conducted continuous observations since 2009. As a result, this RL system can provide extinction coefficient (), backscatter coefficient (), and depolarization ratio () of particles at 532 nm and attenuated backscatter coefficient () at 1064 nm. The configuration and specifications are given in Fig. 2(a) and Table 1. Furthermore, we built a multiwavelength RL system (MRL) providing , , , , , , and at Fukuoka, Toyama, and Hedo sites of the AD-Net. The MRL observations started from 2013 at Fukuoka, from 2014 at Hedo, and from 2015 at Toyama. The configuration and specifications are given in Fig. 2(b) and Table 1. For the RL and MRL measurements, we conduct photon-counting measurement for Raman backscatter and analog measurement for elastic backscatter. No Raman channel data are available in the daytime due to strong sunlight. After reducing signal noises using wavelet transform analysis and moving average, the uncertainties of , , , and lidar ratio () of aerosols in the PBL derived from the RL and MRL measurements are evaluated to be less than 5%, which indicates that the RL and MRL have enough accuracy to understand aerosol optical properties in the PBL. 3.2.Use of High Spectral Resolution Lidar TechniquesThe HSR lidar is a more highly sensitive technique than the RL, indicating that the HSR lidar can provide measurements with enough signal-to-noise ratio in the daytime as well as the nighttime to retrieve , , and . We developed a Raman-HSR lidar (RHL) implementing both the nitrogen RL technique at 387 nm and the HSR lidar technique at 532 nm [Fig. 2(c) and Table 1] at the Tsukuba site from 2014. This RHL provides the same products as the MRL (i.e., , , and at 355 and 532 nm, respectively, and at 1064 nm). This system uses the iodine absorption filter28 to introduce the HSR lidar technique, indicating that the laser wavelength must be tuned to the center of the iodine absorption line to block the elastic scattering light and transmit the Rayleigh scattering light efficiently. We developed and implemented an automatical feedback control system using two acousto optic modulators29 to tune the laser wavelength to the absorption line stably for a long period. We conduct photon-counting measurement for Raman backscatter and analog measurement for elastic backscatter including the Rayleigh scatter. No Raman channel data are available in the daytime. After reducing signal noises in a similar manner as the data analysis of the MRL, the uncertainties of , , , and of aerosols in the PBL are evaluated to be comparable to or less than the uncertainties of MRL. Those uncertainties for nighttime are less than half of uncertainties for daytime. 3.3.Aerosol Component RetrievalA two-component (i.e., mineral dust and spherical particles) algorithm14 using the EL data was implemented in the standard data processing, and the component products as well as the other products have been provided in public (see Sec. 2.3). Furthermore, as another algorithm using the EL data, we developed a three-component (i.e., mineral dust, sea-salt, and air pollution particles) algorithm30,31 to estimate a vertical distribution of extinction coefficient for the three aerosol components. This algorithm uses the difference of due to particle size and the difference of due to particle shape among the aerosol components. For the RL, MRL, and RHL measurements, a four-component (i.e., mineral dust, sea-salt, black carbon, and air pollution particles except black carbon) algorithm27,32 that further uses the difference of due to light absorption property among the aerosol components was developed. The aerosol component products by three- and four-aerosol component algorithms as well as the aerosol and cloud optical property data (i.e., , , , and ) will be made public in the future. Since the developed three- and four-aerosol component retrieval algorithms do not use all the data of MRL and RHL, an aerosol component retrieval algorithm using all the data of MRL and RHL more effectively is being developed to provide more detailed optical and microphysical properties of each aerosol component. 4.Concluding RemarksTwenty-first century spaceborne lidar (e.g., Ref. 33) covers a wide area of the globe, including oceans and deserts. In contrast, ground-based lidar can cover only the atmosphere above the observatory. However, it can acquire continuous time series of data, and it is useful for monitoring environmental conditions directly related to human populations. Thus, ground-based lidar networks are still very important. In particular, in East Asia, rapid economic growth and changes in environmental protection policy have been significant in several countries. As a result, atmospheric conditions in East Asia can vary greatly. Optical remote sensing is a feasible method for detecting such variation and for detecting emergency conditions, so alerts can be issued for the local inhabitants. Also, data from lidar networks are useful for various types of studies in the field of atmospheric science. AD-Net is now affiliated with GALION [Global Atmosphere Watch (GAW) Lidar Observations Network], a World Meteorological Organization program. Through GALION, lidar data from around the world are distributed to scientific users such as CTM developers. NIES provides netCDF files of optical properties through its website. AD-Net will continue to monitor the atmosphere in East Asia and to supply information, including data on optical properties obtained with new technologies, to society. Furthermore, as part of AD-Net observation, we conducted ship-borne lidar measurements using the EL from 1999 to 2015 (e.g., Refs. 34, 35) and using a 532-nm HSR lidar with water–vapor Raman channel at 660 nm in 2011 (e.g., Refs. 36, 37) in corroboration with the Japan Agency for Marine-Earth Science and Technology (JAMSTEC). The MRL with water-vapor Raman scattering detection channel (660 nm) has been used since 2015. It is essential for observing temporal and spatial distributions of aerosols and clouds and their optical and microphysical properties over land and ocean to understand and evaluate global environmental change. AcknowledgmentsThis study was partly supported by the Environment Research and Technology Development Fund (5-1502) of the Ministry of the Environment, Japan, by a Grant-in-Aid for Scientific Research on Innovative Areas of the Ministry of Education, Culture, Sports, Science and Technology, Japan (20120006), and a Grant-in-Aid for Scientific Research (25220101) from the Japan Society for the Promotion of Science. The authors are grateful to all scientists who operate the lidar instruments in AD-Net and Ichiro Matsui of mss. Authors express sincere gratitude to anonymous reviewers. ReferencesIntergovernmental Panel on Climate Change, Cambridge University Press(2014). Google Scholar
Air Pollution and Cancer, World Health Organization(2013). Google Scholar
G. Pappalardo et al.,
“EARLINET: towards an advanced sustainable European aerosol lidar network,”
Atmos. Meas. Tech., 7 2389
–2409
(2014). http://dx.doi.org/10.5194/amt-7-2389-2014 Google Scholar
J. R. Levis et al.,
“Overview of MPLNET version 3 cloud detection,”
J. Atmos. Oceanic Technol., 33 2113
–2134
(2016). http://dx.doi.org/10.1175/JTECH-D-15-0190.1 JAOTES 0739-0572 Google Scholar
J. L. Guerrero-Rascado et al.,
“Latin American Lidar Network (LALINET) for aerosol research: diagnosis on network instrumentation,”
J. Atmos. Sol. Terr. Phys., 138–139 112
–120
(2016). http://dx.doi.org/10.1016/j.jastp.2016.01.001 JASPF3 1364-6826 Google Scholar
J. H. Seinfeld et al.,
“ACE-ASIA: regional climatic and atmospheric chemical effects of Asian dust and pollution,”
Bull. Am. Meteorol. Soc., 85 367
–380
(2004). http://dx.doi.org/10.1175/BAMS-85-3-367 BAMIAT 0003-0007 Google Scholar
A. Shimizu et al.,
“Continuous observations of Asian dust and other aerosols by polarization lidars in China and Japan during ACE-Asia,”
J. Geophys. Res., 109 D19S17
(2004). http://dx.doi.org/10.1029/2002JD003253 JGREA2 0148-0227 Google Scholar
T. Murayama et al.,
“An intercomparison of lidar-derived aerosol optical properties with airborne measurements near Tokyo during ACE-Asia,”
J. Geophys. Res., 108 8561
(2004). http://dx.doi.org/10.1029/2002JD003259 JGREA2 0148-0227 Google Scholar
Y. Iwasaka et al.,
“Transport of Asian dust (KOSA) particles; importance of weak KOSA events on the geochemical cycle of soil particles,”
Tellus, 35B 189
–196
(1988). http://dx.doi.org/10.1111/teb.1983.35B.issue-3 TELLAL 0040-2826 Google Scholar
V. Freudenthaler et al.,
“Depolarization ratio profiling at several wavelengths in pure Saharan dust during SAMUM 2006,”
Tellus, 61 165
–179
(2009). http://dx.doi.org/10.1111/j.1600-0889.2008.00396.x TELLAL 0040-2826 Google Scholar
F. G. Fernald,
“Analysis of atmospheric lidar observations—some comments,”
Appl. Opt., 23
(5), 652
–653
(1984). http://dx.doi.org/10.1364/AO.23.000652 APOPAI 0003-6935 Google Scholar
COSPAR International Reference Atmosphere (CIRA-86): Global Climatology of Atmospheric Parameters, NCAS British Atmospheric Data Centre(2006). Google Scholar
N. Sugimoto et al.,
“Record heavy Asian dust in Beijing in 2002: observations and model analysis of recent events,”
Geophys. Res. Lett., 30 1640
(2003). http://dx.doi.org/10.1029/2002GL016349 GPRLAJ 0094-8276 Google Scholar
A. Shimizu et al.,
“Relationship between lidar-derived dust extinction coefficients and mass concentrations in Japan,”
Sci. Online Lett. Atmos., 7A 1
–4
(2011). http://dx.doi.org/10.2151/sola.7A-001 Google Scholar
N. Kaneyasu et al.,
“Comparison of Lidar-derived dust extinction coefficients and the mass concentrations of surface aerosol,”
J. Jpn. Soc. Atmos. Environ., 47 285
–291
(2012). http://doi.org/10.11298/taiki.47.285 Google Scholar
Y. Hara et al.,
“Seasonal characteristics of spherical aerosol distribution in eastern Asia: Integrated analysis using ground/space-based lidars and a chemical transport model,”
Sci. Online Lett. Atmos., 7 121
–124
(2011). http://dx.doi.org/10.2151/sola.2011-031 Google Scholar
D. Goto et al.,
“An evaluation of simulated particulate sulfate over East Asia through global model intercomparison,”
J. Geophys. Res., 120 6247
–6270
(2015). http://dx.doi.org/10.1002/2014JD021693 JGREA2 0148-0227 Google Scholar
K. Yumimoto et al.,
“Adjoint inversion modeling of Asian dust emission using lidar observations,”
Atmos. Chem. Phys., 8 2869
–2884
(2008). http://dx.doi.org/10.5194/acp-8-2869-2008 ACPTCE 1680-7324 Google Scholar
K. Ueda et al.,
“Long-range transported Asian dust and emergency ambulance dispatches,”
Inhalation Toxicol., 24 858
–867
(2012). http://dx.doi.org/10.3109/08958378.2012.724729 INHTE5 0895-8378 Google Scholar
K. Kanatani et al.,
“Effect of desert dust exposure on allergic symptoms: a natural experiment in Japan,”
Ann. Allergy, Asthma Immunol., 116
(5), 425
–430
(2016). http://dx.doi.org/10.1016/j.anai.2016.02.002 Google Scholar
T. Higashi et al.,
“Effects of Asian dust on daily cough occurrence in patients with chronic cough: a panel study,”
Atmos. Environ., 92 506
–513
(2014). http://dx.doi.org/10.1016/j.atmosenv.2014.04.034 AENVEQ 0004-6981 Google Scholar
M. Watanabe et al.,
“Association of sand dust particles with pulmonary function and respiratory symptoms in adult patients with asthma in western Japan using light detection and ranging: a panel study,”
Int. J. Environ. Res. Public Health, 12
(10), 13038
–13052
(2015). http://dx.doi.org/10.3390/ijerph121013038 Google Scholar
S. Kashima et al.,
“Asian dust and daily all-cause or cause-specific mortality in western Japan,”
Occup. Environ. Med., 69 908
–915
(2012). http://dx.doi.org/10.1136/oemed-2012-100797 OEMEEM 1351-0711 Google Scholar
Z. Lu et al.,
“Sulfur dioxide emissions in China and sulfur trends in East Asia since 2000,”
Atmos. Chem. Phys., 10 6311
–6331
(2010). http://dx.doi.org/10.5194/acp-10-6311-2010 ACPTCE 1680-7324 Google Scholar
N. Sugimoto et al.,
“Observation of dust and anthropogenic aerosol plumes in the Northwest Pacific with a two-wavelength polarization lidar on board the research vessel Mirai,”
Geophys. Res. Lett., 29 71
–74
(2002). http://dx.doi.org/10.1029/2002GL015112 GPRLAJ 0094-8276 Google Scholar
N. Sugimoto et al.,
“Detection of internally mixed Asian dust with air pollution aerosols using a polarization optical particle counter and a polarization-sensitive two-wavelength lidar,”
J. Quant. Spectrosc. Radiat. Transfer, 150 107
–113
(2015). http://dx.doi.org/10.1016/j.jqsrt.2014.08.003 JQSRAE 0022-4073 Google Scholar
T. Nishizawa et al.,
“Ground-based network observation using Mie-Raman Lidars and multi-wavelength Raman lidars and algorithm to retrieve distributions of aerosol components,”
J. Quant. Spectrosc. Radiat. Transf.,
(2016). http://dx.doi.org/10.1016/j.jqsrt.2016.06.031 Google Scholar
Z. Liu, I. Matsui and N. Sugimoto,
“High-spectral-resolution lidar using an iodine absorption filter for atmospheric measurements,”
Opt. Eng., 38 1661
–1670
(1999). http://dx.doi.org/10.1117/1.602218 Google Scholar
T. Nishizawa, N. Sugimoto and I. Matsui,
“Development of a dual-wavelength high-spectral-resolution lidar,”
Proc. SPIE, 7860 78600D
(2010). http://dx.doi.org/10.1117/12.870068 PSISDG 0277-786X Google Scholar
T. Nishizawa et al.,
“An algorithm that retrieves aerosol properties from dual-wavelength polarization lidar measurements,”
J. Geophys. Res., 112 D06212
(2007). http://dx.doi.org/10.1029/2006JD007435 JGREA2 0148-0227 Google Scholar
T. Nishizawa et al.,
“Algorithm to retrieve aerosol optical properties from two-wavelength backscatter and one-wavelength polarization lidar considering nonsphericity of dust,”
J. Quant. Spectrosc. Radiat. Transfer, 112 254
–267
(2011). http://dx.doi.org/10.1016/j.jqsrt.2010.06.002 JQSRAE 0022-4073 Google Scholar
T. Nishizawa et al.,
“Algorithm to retrieve aerosol optical properties from high-spectral-resolution lidar and polarization Mie-scattering lidar measurements,”
IEEE Trans. Geosci. Remote Sens., 46 4094
–4103
(2008). http://dx.doi.org/10.1109/TGRS.2008.2000797 IGRSD2 0196-2892 Google Scholar
D. M. Winker et al.,
“Overview of the CALIPSO mission and CALIOP data processing algorithms,”
J. Atmos. Oceanic Technol., 26 2310
–2323
(2009). http://dx.doi.org/10.1175/2009JTECHA1281.1 JAOTES 0739-0572 Google Scholar
N. Sugimoto et al.,
“Latitudinal distribution of aerosols and clouds in the western Pacific observed with a lidar on board the research vessel Mirai,”
Geophys. Res. Lett., 28 4187
–4190
(2001). http://dx.doi.org/10.1029/2001GL013510 GPRLAJ 0094-8276 Google Scholar
T. Nishizawa et al.,
“Aerosol retrieval from two-wavelength backscatter and one-wavelength polarization lidar measurement taken during the MR01K02 cruise of the R/V Mirai and evaluation of a global aerosol transport model,”
J. Geophys. Res., 113 D21201
(2008). http://dx.doi.org/10.1029/2007JD009640 JGREA2 0148-0227 Google Scholar
J. Suzuki et al.,
“The occurrence of cirrus clouds associated with eastward propagating equatorial n=0 inertio-gravity and Kelvin waves in November 2011 during the CINDY2011/DYNAMO campaign,”
J. Geophys. Res., 118 12, 941
–12, 947
(2013). http://dx.doi.org/10.1002/2013JD19960 JGREA2 0148-0227 Google Scholar
H. Bellenger et al.,
“Observation of moisture tendencies related to shallow convection,”
J. Atmos. Sci., 72 641
–659
(2015). http://dx.doi.org/10.1175/JAS-D-14-0042.1 JAHSAK 0022-4928 Google Scholar
BiographyAtsushi Shimizu is a senior researcher at the National Institute for Environmental Studies (NIES), Japan. He received his BS degree from the Science Faculty, Kyoto University, in 1994 and his MS degree and PhD in atmospheric physics from the Graduate School of Science, Kyoto University, in 1996 and 1999, respectively. Tomoaki Nishizawa received his BS, MS, and DSc degrees in geophysics from Tohoku University, Japan, in 1999, 2001, and 2004, respectively. He has worked for NIES, Japan since 2007 and is currently a head of the Advanced Remote Sensing Section of NIES. His research field is related to atmospheric environment and climate. He is engaged in aerosol and cloud observation using lidars and development of lidar systems and data analysis methods. Yoshitaka Jin is a research associate of the NIES, Japan. He received his DSc degree from Nagoya University in 2014. Since 2009, he has conducted research on aerosol optical properties with active remote sensing. His current research covers the development of high-spectral-resolution lidar methods and applications of ceilometer for aerosol measurement. He is a member of the Japan Association of Aerosol Science and Technology, and the Meteorological Society of Japan. Sang-Woo Kim is an associate professor of the School of Earth and Environmental Sciences, Seoul National University, Republic of Korea. He received his PhD in atmospheric sciences from Seoul National University in 2005 and has conducted research on the monitoring of air pollutants and atmospheric aerosols and evaluating their climate effects based on ground-based and airborne in situ and active optical remote sensing measurements. Batdorj Dahdondog is a senior officer of the National Agency for Meteorology and Environmental Monitoring of Mongolia (NAMEM). He received his master’s degree from the National University of Mongolia in 2005. Since he joined the Institute of Meteorology and Hydrology (IMH) in 2003. He has conducted various research in the climatology and environmental field. Nobuo Sugimoto is a fellow of NIES, Japan. He received his DSc degree in laser spectroscopy from the University of Tokyo in 1985. Since he joined NIES in 1979, he has conducted various research on the development and applications of active optical remote sensing methods, including differential absorption lidars, high-spectral-resolution lidars, and ground-based networks of lidars. He is a member of SPIE and a senior member of OSA. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||