|
|
1.IntroductionProjective geometry is an important topic in computer vision because it provides a useful camera imaging model and its fundamental properties.1 Some applications of this topic are found in camera motion,2 camera calibration,3,4 pose estimation for augmented reality,5 perspective correction,6 and three-dimensional (3-D) surface imaging7 among others. Theoretical concepts of projective geometry are analyzed simply and elegantly using homogeneous coordinates.8,9 However, projective geometry is commonly presented in abstract form, leaving a gap in how to apply it in computer vision problems.10 Moreover, homogeneous coordinates are used with a notation that masks basic geometrical aspects and may confuse the inexperienced readers.11 In this paper, a simple and intuitive approach to expose some useful concepts of projective geometry is addressed. For this, an alternative notation for homogeneous coordinates based on operators is suggested. To highlight the relevance of this topic in computer vision, the presentation is motivated by a specific problem, namely the perspective correction for a “camera scanner” application. First, the proposed operators for homogeneous coordinates are defined in Sec. 2. Next, some basic concepts of projective geometry in the one- (1-D) and two-dimensional (2-D) cases are presented in Secs. 3 and 4, respectively. Then, the pinhole camera model is derived in Sec. 5. A perspective correction method, useful for camera document scanning, is described in Sec. 6. Finally, the conclusions of this work are given in Sec. 7. The paper is complemented with two appendices. Appendix A presents the direct linear transformation method for homography matrix estimation. Finally, a simple method to obtain the camera parameters from homographies is explained in Appendix B. 2.Definition of Operators2.1.Operators andA point in an -dimensional space will be represented by a vector of the form where denotes the transpose. The homogeneous coordinates of the point are obtained by adding an extra entry to with a value equal to the unity. The result is the -dimensional vector where will be referred to as the homogeneous operator.The last entry of a homogeneous vector is known as the scale and will be recovered by the scale operator . This operator returns the last entry of any given vector. For instance, for the vectors in Eqs. (1) and (2), we have The operator sets the scale to unity. Another operator that sets the scale to zero is needed. For this, we define the operator Note that the operator does not affect neither the direction nor the norm of . In projective geometry, the points represented by homogeneous coordinates of the form are known as ideal points, where is the -dimensional zero vector.The operators and can be considered as two particular cases of a more general operator defined as where is any scalar.The procedure of adding an extra entry to vectors is reverted by returning the given vector except its last entry. For this, we define the inverse operator as follows. For any -dimensional vector the operator is defined as Based on the operator , the inverse of the operator for is defined as In particular, the operator (written simply as ) will be referred to as the inverse homogeneous operator.The inverse is a linear operator. That is, for any two scalars and , we have On the other hand, the operator is invariant to nonzero scalar multiplication of its argument. That is, The operators and can be expressed in terms of the homogeneous operator and its inverse, namely where and being the identity matrix.2.2.Projection OperatorIn general terms, the homogeneous operator carries the representation of a point from - to -dimensional vectors while the inverse homogeneous operator returns the representation from - to -dimensional vectors. An important transformation emerges when, in the -dimensional space, a linear mapping is applied. Mathematically, we describe this transformation by the projection operator defined as where is an matrix. A generalized version of the projection operator is obtained using and its inverse as From Eq. (11), it follows that, for , the operator is invariant to nonzero scalar multiplication of the matrix ; that is Let with being a nonsingular matrix. From Eq. (15), we have that . Therefore, the inverse operator is given by where denotes the determinant of .Using the equations in Eq. (12), the operator can be expressed in terms of the projection operator, namely Note that and are similar matrices. Some useful equalities of the defined operators are summarized in Table 1. For a more comprehensible reading of this paper, the reader is encouraged to demonstrate all the equalities in Table 1.Table 1Some useful equalities of the operators S, Hs, and PM,s. In all cases, we consider λ≠0, γ1 and γ2 are any scalars, x is a n-dimensional vector as given in Eq. (1), Ξs is the matrix defined in Eq. (13), y=λHs[x], M is a matrix of size (n+1)×(n+1), and W is a matrix of size m×(n+1).
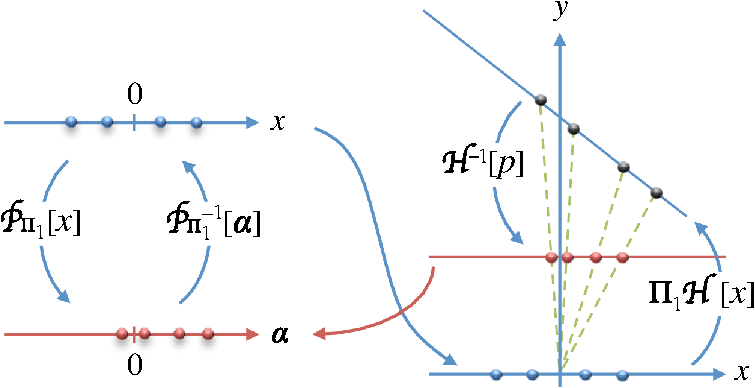
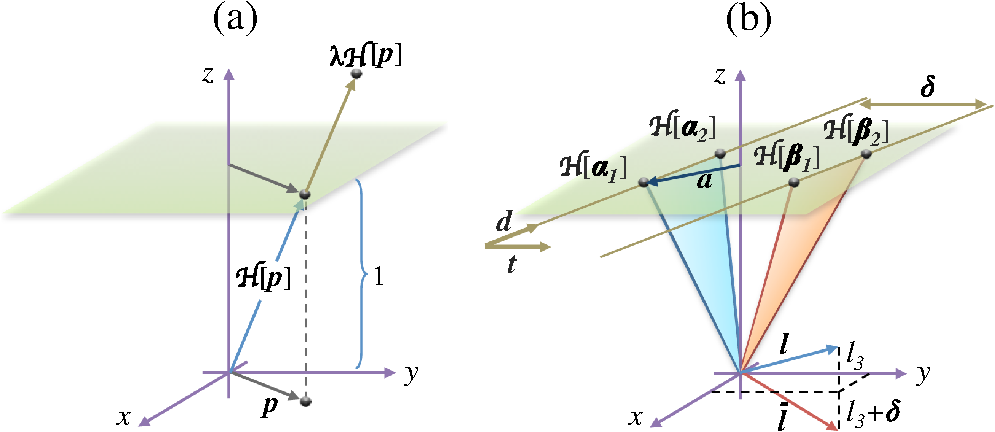
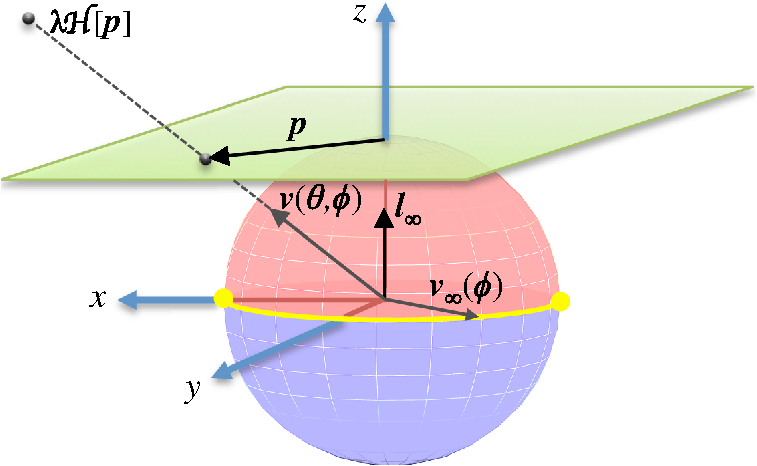
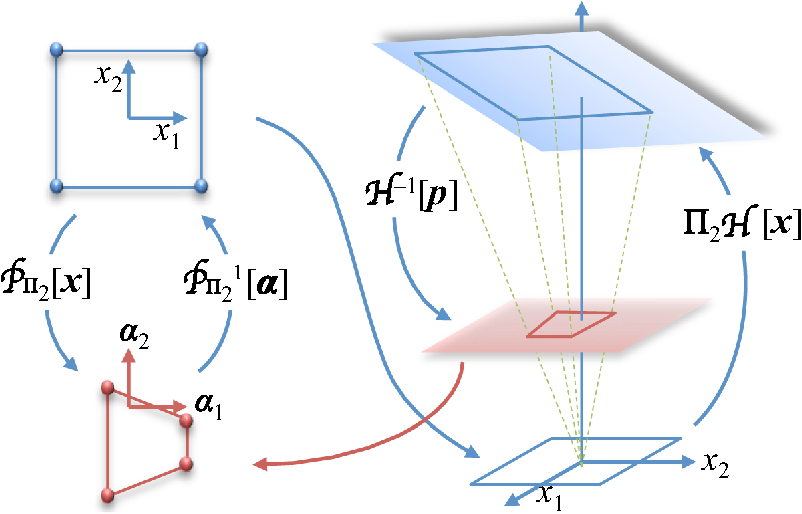
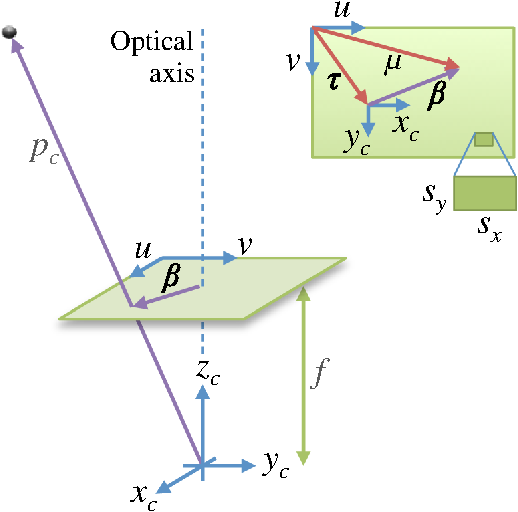
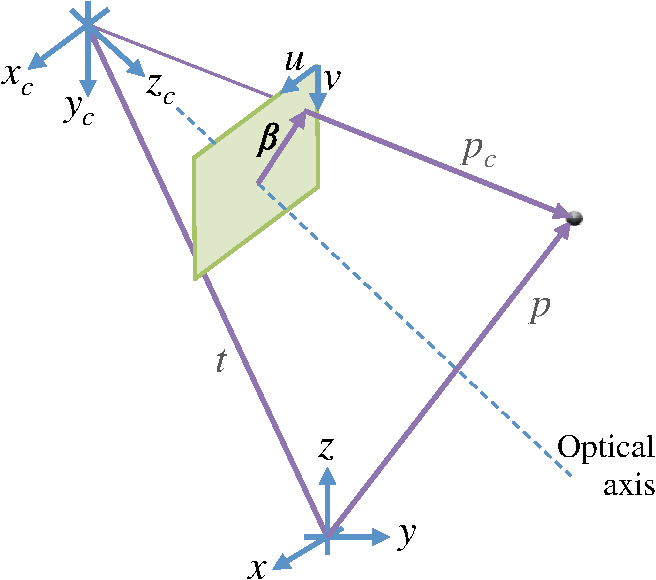
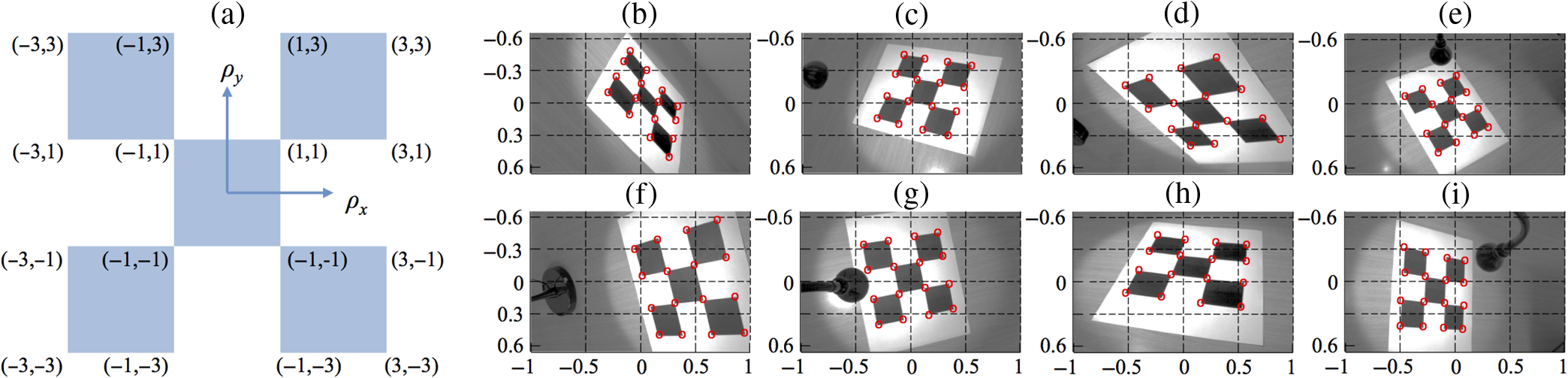
In the following sections, the defined operators are studied from an intuitive geometrical approach for the 1-D and 2-D cases. Then, the usefulness of this theoretical framework is illustrated by addressing the perspective correction problem for camera document scanning. 3.One-Dimensional SpaceThe 1-D real space can be represented as a line as shown in Fig. 1(a). In this space, a point at a finite distance from the origin is represented by a real number ; otherwise, the point is represented by the symbol . Fig. 1(a) The real line as the 1-D Euclidean space. (b) The 1-D space represented by the projective line () in a 2-D Euclidean space. 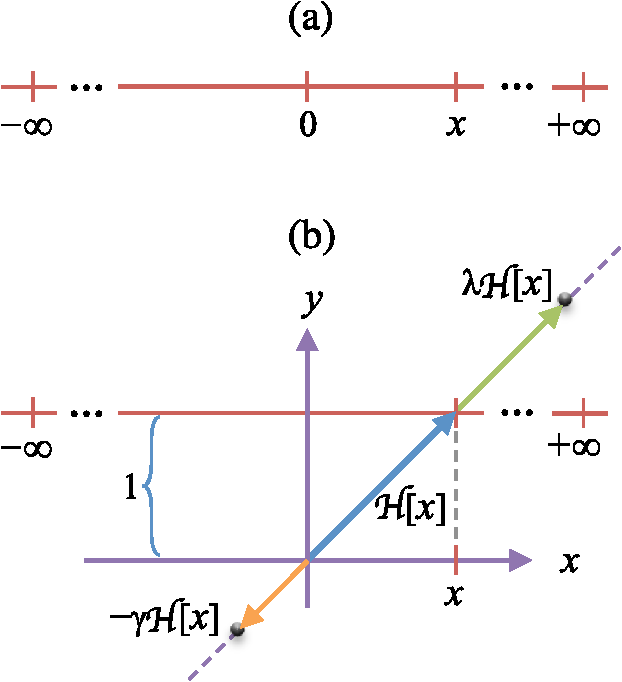 Alternatively, the 1-D space can be represented by the projective line in the -plane as shown in Fig. 1(b). Thus, the coordinate of a point in the line becomes the vector The coordinate can be recovered from its homogeneous version as the intersection between the line and the line with direction passing through the origin as shown in Fig. 1(b). This is described mathematically as Note that the result is invariant to the scalar multiplication of by a nonzero scalar [e.g., and as shown in Fig. 1(b)] because the intersection between lines is unaltered. In other words, as stated by Eq. (11).3.1.Ideal PointHomogeneous coordinates provide a different form to identify points of the real line. Consider the unit vector Thus, the homogeneous representation of given by Eq. (19) becomes where and . From Eq. (22), we obtain Since a vector and its opposite represent the same point (i.e., ), all points of the real line at a finite distance from the origin are associated to a unique angle in the open interval ; i.e., the vectors different to [1, 0] and in the quadrants I and II, as shown in Fig. 2.Fig. 2Representation of points of the real line using homogeneous coordinates. Opposite homogeneous vectors represent the same point; thus, there is a single point at infinity, given by . 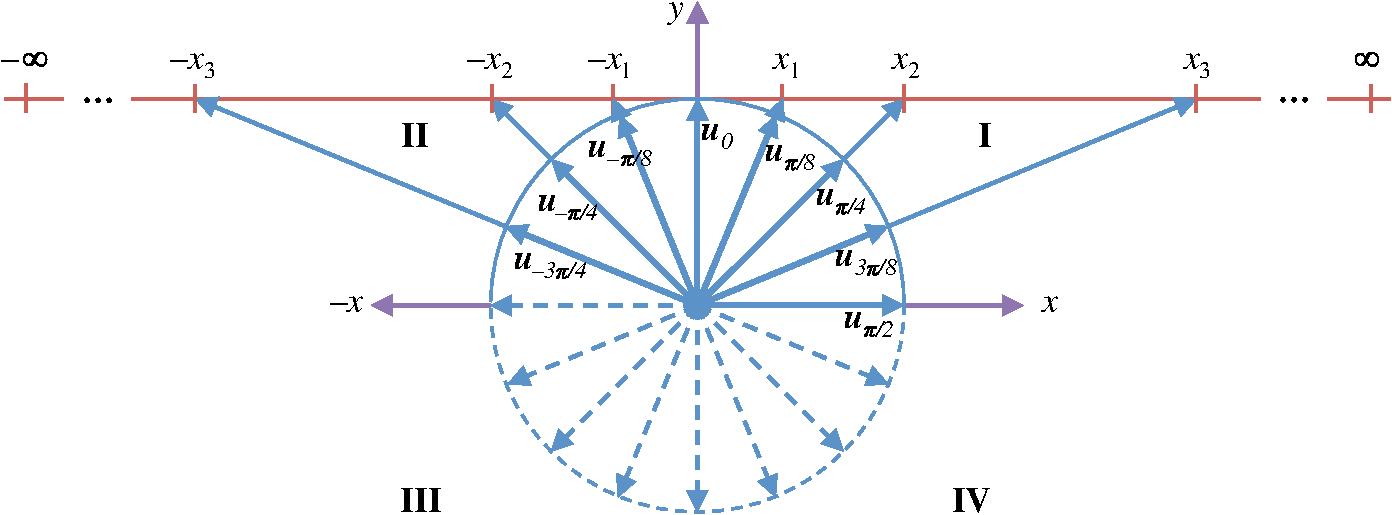 Intuitively, the real line in Euclidean representation has two points at infinity, namely and . However, in projective geometry, the real line has only a single point at infinity given by the homogeneous coordinates which is associated to , as shown in Fig. 2. It could be argued that corresponds to while to . However, note that is the opposite of . Hence, they represent the same point.Note that is consistent with the notion that represents a point at infinity distance from the origin. According to the concepts of projective geometry, the vector represents an ideal point, see Eq. (5). 3.2.One-Dimensional ProjectionThe line can be transformed to any other line by applying a rotation and a translation . Thus, a point in the line , represented by the scalar , becomes a point in the -plane given by the vector where the matrix will be referred to as the reference line parameters and has the explicit form The first column of and the determinant provide the direction of the reference line and its distance from the origin, respectively.If the matrix is singular, the vectors and are collinear. In this case, the origin is a point of the transformed line (the distance of the line from the origin is zero). The matrix is nonsingular when and are linearly independent. In this case, the origin is not a point of the transformed line. Let in Eq. (25) be the homogeneous coordinates of a point in the line. Thus, we obtain the 1-D projection The transformations by and its inverse are shown in Fig. 3.4.Two-Dimensional Space4.1.Points and Lines in the PlaneAny point in the 2-D space can be represented as the vector Moreover, the point can be represented by its homogeneous coordinates as shown in Fig. 4(a). Note that takes the 2-D vector (in the plane ) and converts it to the 3-D vector , where is unaltered but now it lies in the projective plane . It is worth mentioning that the vector can be recovered from as the point of intersection of the line with points and , see Eq. (11). That is, A line in the plane -plane can be written as the homogeneous equation where , , and are coefficients. Using homogeneous coordinates, Eq. (31) becomes where is a point of the line and is the vector that defines the line. Equation (32) exhibits that and are orthogonal vectors. Note that the vector is unique up to scale, i.e., the vectors and , with , represent the same line.Let and be two different points in the -plane. The vector of the line passing through and can be obtained by the cross product as By definition of the cross product, the vector is orthogonal to and . Therefore, these vectors satisfy Eq. (32).Consider two lines defined by the vectors and . If is the intersection point of these lines, then is orthogonal to and . That is where . Therefore, the intersection point of the lines and is4.2.Parallel LinesTwo different lines are parallel if its defining vectors are of the form where , . This can be verified as follows. Consider two parallel lines in the plane with points and given, respectively, by where is a parameter, is a constant, is a reference point, is a unit vector with direction of the line, and is a unit vector orthogonal to , i.e., as shown in Fig. 4(b). Two points of each line are Thus, the vector of the line with points is or, since the line is unaffected by scaling of its vector Similarly, the vector of the line with points is where . Therefore, the vectors and given in Eq. (36) represent parallel lines.It is worth mentioning that, if is the vector of a line with direction [see Eq. (40)], then the vector is orthogonal to , namely 4.3.Ideal Points and the Line at InfinityIn the Euclidean geometry, two parallel lines in the plane do not intersect. However, in the projective geometry, two different lines always intersect at a point. Consider the parallel lines given by the vectors in Eq. (36). Using Eq. (35), the intersection point is where is the point of intersection in homogeneous coordinates. Note that provides the insight that parallel lines intersecting at a point at infinity. As in the 1-D case, the vector represents ideal points, see Eq. (5).The vector is associated with the direction of the line . This is verified by taking into account that is orthogonal to [Eq. (42)] as well as to (), then where is some nonzero scalar.All ideal points given by Eq. (44) are collinear. The vector of such a line, known as the line at infinity, is This can be easily verified by as required by Eq. (32).The ideal point in Eq. (44) was obtained as the intersection of two parallel lines and . However, the intuition suggests that the same result could be obtained by computing the intersection of the line and the line at infinity . In fact, we have that Thus, using Eq. (45), the direction of any line is given by where is a nonzero scale factor. For this reason, the line is interpreted as the set of directions of lines in the plane.Similar to the 1-D case, homogeneous coordinates provide a different form to identify points of the plane. Consider the unit vector where and are polar and azimuth angles, respectively. Thus, the homogeneous coordinates for each point on the plane are given by where . From Eq. (50), the following relation holdsThe points of the plane at a finite distance from the origin are given by with and , i.e., the upper hemisphere of the unit sphere, see Fig. 5. The points of the plane at infinity distance from the origin are parameterized by and . These points have the homogeneous coordinates see Eq. (44). That is, the ideal points are represented by the half equator of the unit sphere, see yellow line in Fig. 5.4.4.Two-Dimensional ProjectionAny plane in the 3-D space can be obtained as the plane after a rotation and a translation . Thus, the points represented by , becomes where the matrix will be referred to as the reference plane parameters and has the explicit form The cross product of the first two columns of and provides the normal to the reference plane and its distance from the origin, respectively.The matrix is singular when , , and are coplanar. In this case, the origin is a point of the transformed plane (the distance of the reference plane from the origin is zero). Otherwise, is a nonsingular. Let in Eq. (53) be the homogeneous coordinates of a point in the projective plane. Thus, the relation between the points and is given by the 2-D projection , namely The projection and its inverse are shown in Fig. 6.4.5.Properties of the Two-Dimensional ProjectionAs shown in Fig. 6, the 2-D projection excludes several geometrical properties; e.g., shape, angles, lengths, and ratio of lengths. Fortunately, there are some geometrical properties that are preserved. Particularly, we are interested in three of them that are very useful in practice: namely straightness, line–line intersection, and parallelism of the normal and line at infinity vectors. 4.5.1.Straightness propertyThis property states that a 2-D projection transforms lines to lines.12 This can be shown as follows. Consider a line with vector and points , that is Next, the points are transformed to by Eq. (55). Solving Eq. (55) for and substituting in Eq. (56), we obtain or where with being the abbreviation of or . In summary, the points of a line are transformed by to points of a new line .4.5.2.Line–line intersectionPreservation of the line–line intersection by a 2-D projection refers to the following. If is the point where the lines and intersect, then is the point where intersect the lines In fact, the lines and intersect at the point where the identity of the cross product was applied. By solving Eq. (60) for and substituting in Eq. (63), we obtain4.5.3.Parallelism of the normal and line at infinity vectorsThe normal of the -plane and the vector of the line at infinity are parallel. When the projection is applied, the normal of the reference plane (with parameters ) and the new line at infinity still remain parallel; i.e., , . Actually, the reference plane has the normal see Eq. (54), whereas the vector of the new line at infinity is where , and denotes the cofactor matrix.In the following section, the developed theoretical framework is applied in a real problem. 5.Pinhole Camera ModelIn practice, the imaging process is performed by a camera lens device as shown in Fig. 7(a). This device produces high quality images because of a complicated system of lenses that minimizes aberration and distortion. However, the imaging process can be modeled using a single thin lens as shown in Fig. 7(b). Moreover, the imaging model can be easily derived using the equivalent pinhole camera as shown in Fig. 7(c). Fig. 7(a) Illustration of a camera lens. (b) The imaging process modeled using a single thin lens. (c) A pinhole camera. The planes and are the actual and conjugate image planes, respectively. 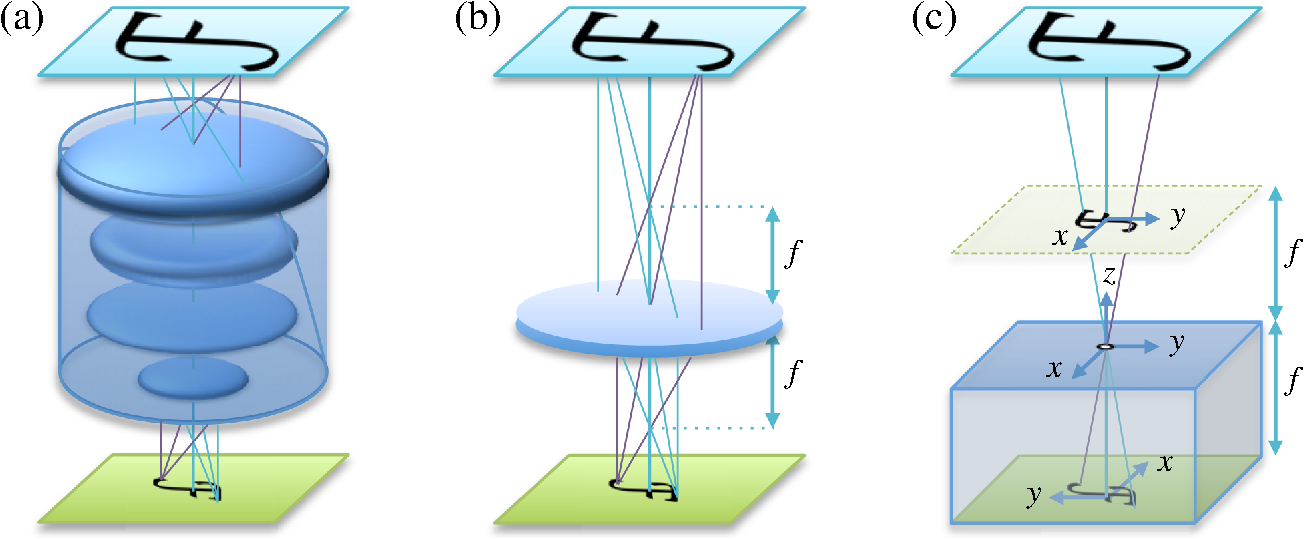 In the pinhole camera, the origin of a coordinate system is fixed at the pinhole and the -axis is parallel to the optical axis. The plane , where is the focal length, is the actual image plane. Note that the image is inverted; therefore, the and axes are reverted to describe the image as a magnified version of the object. The inversion of the axes is avoided using the conjugate image plane as shown in Fig. 7(c). 5.1.Centered Pinhole CameraA typical representation of a pinhole camera is shown in Fig. 8. The coordinate system is known as the camera reference frame. Let be the coordinates of a point in the camera reference frame. The point will be imaged in the plane at the point where will be referred to as the physical image coordinates. The pinhole projection model relates the vectors and by Using homogeneous coordinates for the image point , Eq. (70) can be rewritten as The image formed in the sensor of the camera is sampled as an array of pixels. Then, the physical coordinates will be transformed to the pixel coordinates which depend on the size of the pixel and skew (diagonal distortion) as shown in Fig. 8. The sampling can be described as where and (with units of length) are the width and height of the pixel, respectively, is known as the principal point and represents the point (from the -reference frame) where the optical axis crosses the image plane, and is the skew factor ( for most camera sensors). Equation (73) can be written as or using a compact notation where is the sampling matrix given as Substituting Eq. (71) into Eq. (75), we obtain the image (in pixel coordinates) of the point as where is known as the matrix of intrinsic camera parameters having the explicit form Since , the matrix is nonsingular for any experimental case.Given a point (in pixel coordinates), the actual coordinates of an image point (physical coordinates on the image plane ) can be obtained from Eq. (75) as where the equality was used.5.2.Noncentered Pinhole CameraLet us consider that the pinhole camera is at an arbitrary position and orientation with respect to a world coordinate system as shown in Fig. 9. The position and orientation of the camera are defined by the vector and the rotation matrix , respectively. Let be a point in the world coordinate system. Then, the point is seen from the camera reference frame as where is known as the matrix of extrinsic camera parameters having the explicit form By substituting Eq. (81) into Eq. (77), the complete imaging process by a noncentered pinhole camera is given as where is the matrix of the camera.5.3.Homography MatrixIn general terms, Eq. (83) describes a transformation of points of the 3-D space to points of the 2-D one. A very useful transformation is obtained when represents points of a plane in the 3-D space. In this case, Eq. (83) is reduced to a transformation from the 2-D space to itself. Consider that represents the points of a plane in the 3-D space; mathematically, see Eq. (53) where parameterizes the plane, is the matrix of the plane, and are columns of the rotation matrix , and is a translation vector. Next, the points are transformed to by Eq. (83) as where is known as the homography matrix and has the explicit form where From Eqs. (79) and (85), a point is imaged at the point with actual image coordinates where .The homography matrix is singular when the pinhole is at a point of the reference plane. For any other case, and Eq. (85) can be inverted as The homography matrix is very useful for many computer vision tasks. In Appendix A, the direct linear transformation method for homography estimation is described.6.Perspective Correction for Document ScanningA camera document scanning application performs several image processing tasks, such as quadrilateral detection, perspective correction, resampling, and image enhancement. In this section, the perspective correction task is addressed to illustrate the application of the proposed approach. 6.1.AssumptionsIn Appendix A, we show that the perspective of a flat object can be easily corrected using the associated homography. For this, at least four correspondences must be provided. However, for practical document scanning, the coordinates are unknown. Instead, it is assumed that the document to be digitized is rectangular and the orthogonality and parallelism properties of its edges are exploited. The estimation of the homography is greatly simplified by assuming a centered pinhole camera with known intrinsic parameters; e.g., by a previous camera calibration, see Appendix B. Thus, we only require to estimate the reference plane parameters , i.e., the rotation matrix and the translation vector , see Eq. (84). 6.2.Estimation of the Reference Plane ParametersConsider a coordinate system in the reference plane with origin at the center of the document to be scanned as shown in Fig. 10(a). The - and -axes of this coordinate system are parallel with the upper/lower and left/right sides of the paper, respectively. The corners of the document to be digitized have coordinates given by the vectors In this configuration, the vectors are symmetric about the -axis; that is where When the document is imaged by the camera, the original rectangle is transformed to a quadrilateral because of the perspective distortion. The corners of the imaged document have coordinates given by the vectors as shown in Fig. 10(b). The vectors and are related by Eqs. (85) and (89); however, the vectors and the homography are unavailable. Only the vectors are available, which are easily obtained from the image by pointing the vertexes of the imaged document.Fig. 10(a) Depict of the rectangular paper to be digitized. (b) The quadrilateral obtained by pinhole imaging of a rectangular paper. (c) The remaining rotation after perspective correction of the quadrilateral shown in (b). 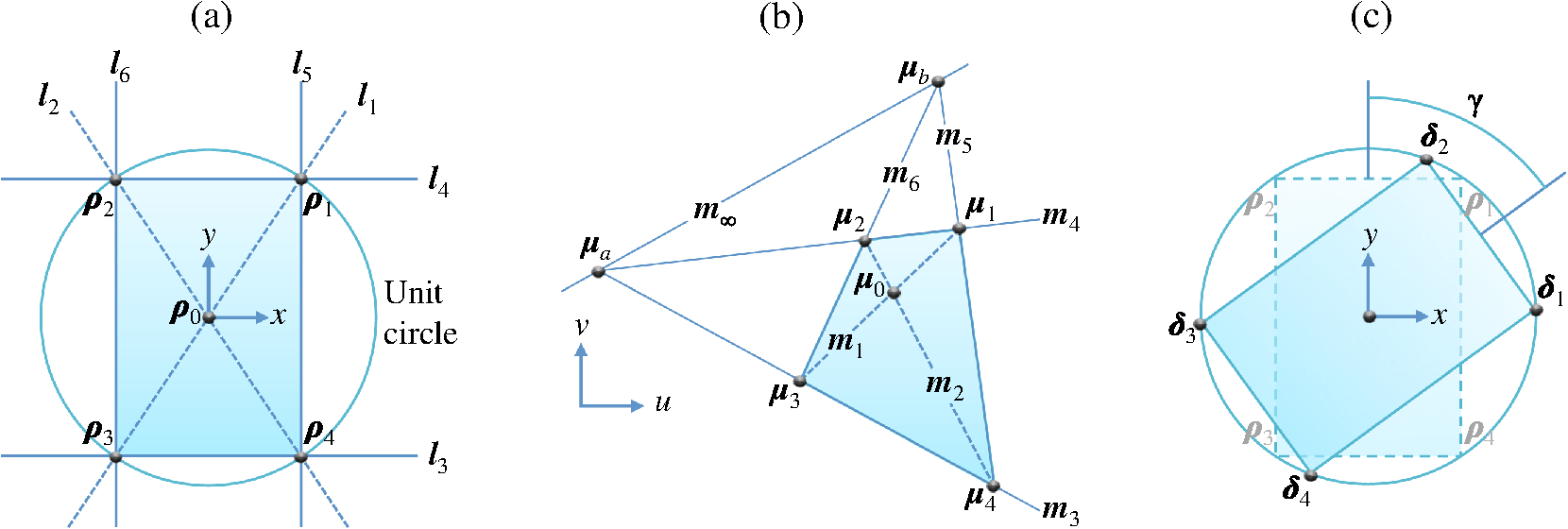 The points are used to compute the following lines, see Fig. 10(b), Next, with the lines , the following three intersection points are computed Since the intrinsic camera parameters are assumed to be known, the actual image coordinates of the points can be obtained by Eq. (79) as with .6.2.1.Normal vectorNote that the points and are the projections of the ideal points respectively. Thus, the line (in physical coordinates on the image plane ) is parallel to the normal , see Eq. (67). That is, for some . Thus, the normal of the reference plane is obtained as the normalization of the vector , namely6.2.2.Translation vectorThe translation vector is obtained by taking into account that preserves the line–line intersection. Thus, from Eq. (65) we have with . Therefore, from Eq. (88) we have where is a scalar to be determined. For this, note that the vectors are points of the reference for values and such that the equation of the plane is satisfied. This leads to Since the points are on the unit circumference, see Fig. 10(a), then , which leads to where the subindex in emphasizes the fact that a different value could be obtained for each due to inaccuracies of . Therefore, the value is computed as The result is used in Eq. (100), and the translation of the reference plane is now available.6.2.3.Euler anglesThe reference plane is fully characterized by six degrees of freedom (DOF), namely position (three coordinates) and orientation (three angles). The vectors and provide five DOFs. Specifically, the vector provides three DOFs that fix the position while provides two DOFs defining the orientation by the azimuth and polar angles given, respectively, by where is the third column of the rotation matrix . The remaining angle (the angle around the normal ) can be obtained as follows.From Eqs. (84) and (53), we have where the matrix is defined as the Euler sequence with and being the rotation matrices around the - and -axes, respectively. Thus, using Eq. (101), the estimated vector , and the angles and , we compute the (perspective corrected) points with , see Fig. 10(c). The vectors and are related by where The vectors are unavailable, but we use their symmetry properties given in Eq. (91) to obtain The product can be written as where and Thus, Eq. (111) can be rewritten as where The nontrivial solution of Eq. (114) for is obtained as the right-singular vector corresponding to the smallest singular value of . Finally, the angle is obtained from by The estimated parameters are used to create the matrix . Then, the required homography is obtained by Eq. (86) (with and because of the centered pinhole camera configuration). Finally, the perspective distortion of the image is corrected by displaying the intensity of each pixel of the image at the point computed by Eq. (89).6.3.Illustrative ExampleThe functionality of the presented algorithm is illustrated by the following example. The camera described in Appendix B and the estimated intrinsic parameters given in Eq. (156) are used here. Figure 11(a) shows the image of a rectangular object acquired by the camera. Then, the four corners of the quadrilateral are marked from the image as shown by the yellow circles in Fig. 11(b). The points , , and are indicated by the red circles in Fig. 11(b). It is worth mentioning that , or , or both could be points at infinity. Even in these cases, the presented methodology is valid. Fig. 11(a) An input image with a rectangular object in scene. (b) The corners of the rectangle are marked by yellow circles. (c) Corrected image. (d) Zoom of (c) highlighting the region of interest. 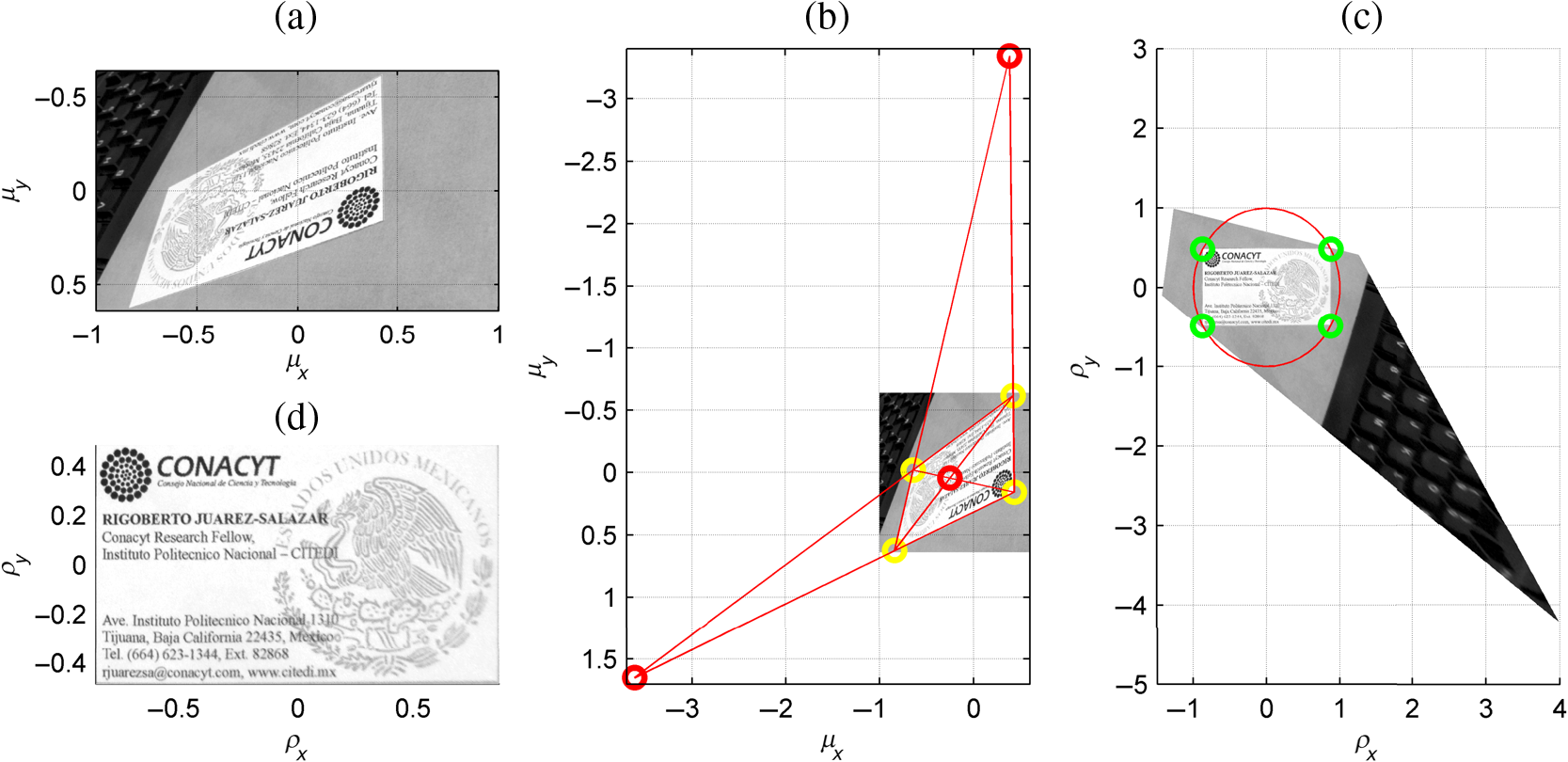 The information estimated with the four corners are With these parameters, the matrix of the reference plane is Thus, the resulting homography is All points of the image are transformed to points of the reference plane by Eq. (89). Next, the pixels of the image are displayed at the points as shown in Fig. 11(c).With the correction of perspective, the yellow circles in Fig. 11(b) become the green ones in Fig. 11(c). The region of interest is the rectangle with corners marked by green circles in Fig. 11(c). Finally, a zoom of the region of interest is shown in Fig. 11(d). 7.ConclusionsAn operator-based approach for homogeneous coordinates was proposed. Several basic geometrical concepts and properties of the operators were investigated. With the proposed approach, the pinhole camera model and a simple camera calibration method were described. The study of this work was motivated by developing a perspective correction method useful for a camera document scanning application. Several experimental results illustrate the analyzed theoretical aspects. The proposed approach could be a good starting point to introduce inexperienced students in the scientific discipline of computer vision. AppendicesAppendix A:Estimation of the Homography MatrixIn this appendix, we illustrate the method known as direct linear transformation for homography matrix estimation. This method is very useful for illustration purposes because of its simplicity. However, the highest accuracy and robustness are reached with other advanced methods available in the literature.9,13 Let be the homography matrix defined in Eq. (86). Consider that the matrix is row partitioned as follows: whereEquation (85), which relates points of the reference and image planes, can be rewritten as orFurthermore, Eq. (123) can be written in matrix form as whereEquation (124) relates a single point on the reference plane with the corresponding point on the image plane. If pairs , with , are available, the corresponding equations of the form Eq. (124) can be written as whereThe nontrivial solution of Eq. (126) can be obtained using the constraint . Thus, by using the singular value decomposition of , the solution for is the right-singular vector corresponding to the smallest singular value of , see Appendix C of Ref. 14. The application of this method is illustrated as follows. Consider the image shown in Fig. 12(a). A letter size paper printed with the Melencolia I by Albrecht Dürer is in the scene. Using the aspect ratio of the letter paper, the coordinates of the corners are fixed to The coordinates of the imaged corners are see yellow circles in Fig. 12(a). With these four pairs , we obtain the homographyThe homography fully defines a pinhole imaging process. Thus, it can be inversed to obtain an undistorted view of the reference plane from its perspective distorted image. Specifically, using Eq. (89) all points of the image are transformed to points of the reference plane. Then, the pixels of the image are displayed at the points as shown in Fig. 12(b). Note that corners of the paper in the corrected image are at the coordinates specified by Eq. (128). The least number of point correspondences for two-dimensional homography estimation is four. However, the accuracy of the estimation is improved when more than four point correspondences are provided. For this reason, checkerboard patterns15 and gratings16,17 are useful target objects. In this appendix, the corner points of the imaged rectangle where obtained manually from the image. However, the corner points can be obtained automatically using checkerboard patterns or gratings along with grid detection18 or phase demodulation,19 respectively. Appendix B:Camera Parameters from HomographiesThe homography matrix involves both intrinsic and extrinsic camera parameters as well as the reference plane parameters . In this appendix, we show how to obtain the intrinsic and extrinsic camera parameters from several homographies. B.1.Intrinsic Camera ParametersConsider that the reference plane is the -plane of the world coordinate system; i.e., and In this case, the homography , defined in Eq. (86), is reduced to where and are the first and second rows of the rotation matrix , respectively. Consider that the matrix is column partitioned as follows: whereThus, Eq. (132) can be written as Since and are orthonormal vectors ( and are rows of a rotation matrix), we have the following two constraints and , which can be written as where the symmetric matrix is defined asThe bilinear form can be rewritten as where andThen, the constraints given by Eq. (136) become where is the following matrix:A nontrivial solution of Eq. (141) for can be obtained using several homographies , . For this, we compute the homographies of different images where the position and orientation of the reference plane (or the camera, or both) are varying (in an unknown manner) while the intrinsic camera parameters remain constant. Thus, we solve the new matrix equation whereIn general, at least three homographies () are required. However, two homographies are sufficient assuming zero-skew. Equation (143) can be solved for using the singular value decomposition method, see Appendix C of Ref. 14. Since the obtained solution, labeled as , is unique up to scale, the associated matrix is related to by where is an unknown constant. With the estimated matrix , the unknown scalar and the entries of the intrinsic parameter matrix are given in closed form as where .It is worth mentioning that the intrinsic camera parameters (, , , , , and ) cannot be obtained using only the matrix . Fortunately, the matrix is sufficient for many computer vision tasks. For the case where the intrinsic camera parameters are required explicitly, we can assume that the skew and size of the pixel are known (e.g., , , and are consulted in the datasheet of the camera sensor). Thus, the estimation of the remaining intrinsic parameters is a linear problem with the least-squares solution B.2.Extrinsic Camera ParametersOnce the matrix is available, the rotation matrix and the translation vector can be estimated for each provided homography as follows. First, we compute the estimate of the matrix as where using Eq. (135), the vectors and are given asThen, the rotation matrix is obtained from ensuring the orthogonality condition of rotation matrices. For this, the singular value decomposition is obtained and the required rotation matrix is determined as Finally, the translation vector is computed as B.3.Illustrative ExampleAs an example, we describe a simple experiment to obtain the intrinsic parameters of a camera. A camera with a pixel size of (square pixel), resolution of , and imaging lens with focal length of 6 mm was used. The checkerboard pattern shown in Fig. 13(a) was printed on a letter paper. Then, 15 images of the printed pattern lying on the reference plane were captured from different unknown viewpoints, see Figs. 13(b)–13(i). We use the coordinates of the corners shown in Fig. 13(a) as the known points on the reference plane. The corresponding points in the image plane were obtained by marking the corners of the checkerboard pattern in the image. Then, with the pairs , an homography matrix was computed for each acquired image. With these homographies, the matrix defined in Eq. (144) was created. Then, Eq. (143) was solved for , the resulting matrix is From this, the intrinsic parameter matrix was recovered as For validation purposes, we estimate the focal length using the known information , and . The reader should note that the quantities and are defined in this experiment as because the points were obtained in a coordinate system with a unit of length equal to a half of the image width, see Figs. 13(b)–13(i). From the matrix in Eq. (156), the focal length was estimated using Eq. (148). The result is , which is very close to the nominal focal length (6 mm) of the employed camera lens.ReferencesO. Faugeras, Q.-T. Luong and T. Papadopoulo, The Geometry of Multiple Images: the Laws that Govern the Formation of Multiple Images of a Scene and Some of Their Applications, MIT Press, Cambridge
(2004). Google Scholar
O. D. Faugeras and S. Maybank,
“Motion from point matches: multiplicity of solutions,”
Int. J. Comput. Vision, 4
(3), 225
–246
(1990). http://dx.doi.org/10.1007/BF00054997 IJCVEQ 0920-5691 Google Scholar
Z. Zhang,
“A flexible new technique for camera calibration,”
IEEE Trans. Pattern Anal. Mach. Intell., 22 1330
–1334
(2000). http://dx.doi.org/10.1109/34.888718 ITPIDJ 0162-8828 Google Scholar
Y. Zhao and Y. Li,
“Camera self-calibration from projection silhouettes of an object in double planar mirrors,”
J. Opt. Soc. Am. A, 34 696
–707
(2017). http://dx.doi.org/10.1364/JOSAA.34.000696 JOAOD6 0740-3232 Google Scholar
T. Taketomi et al.,
“Camera pose estimation under dynamic intrinsic parameter change for augmented reality,”
Comput. Graphics, 44 11
–19
(2014). http://dx.doi.org/10.1016/j.cag.2014.07.003 Google Scholar
H. H. Ip and Y. Chen,
“Planar rectification by solving the intersection of two circles under 2D homography,”
Pattern Recognit., 38
(7), 1117
–1120
(2005). http://dx.doi.org/10.1016/j.patcog.2004.12.004 PTNRA8 0031-3203 Google Scholar
B. Cyganek and J. P. Siebert, An Introduction to 3D Computer Vision Techniques and Algorithms, John Wiley & Sons Ltd., Chichester, West Sussex
(2009). Google Scholar
O. Faugeras, Three-Dimensional Computer Vision: a Geometric Viewpoint, MIT Press, Cambridge
(1993). Google Scholar
R. Hartley and A. Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, Cambridge
(2003). Google Scholar
J. L. Mundy and A. Zisserman, Appendix—Projective Geometry for Machine Vision, 463
–519 MIT Press, Cambridge
(1992). Google Scholar
W. Burger,
“Zhang’s camera calibration algorithm: in-depth tutorial and implementation,”
Hagenberg, Austria
(2016). Google Scholar
F. Devernay and O. Faugeras,
“Straight lines have to be straight,”
Mach. Vision Appl., 13
(1), 14
–24
(2001). http://dx.doi.org/10.1007/PL00013269 MVAPEO 0932-8092 Google Scholar
H. Zeng, X. Deng and Z. Hu,
“A new normalized method on line-based homography estimation,”
Pattern Recognit. Lett., 29
(9), 1236
–1244
(2008). http://dx.doi.org/10.1016/j.patrec.2008.01.031 PRLEDG 0167-8655 Google Scholar
Z. Zhang,
“A flexible new technique for camera calibration,”
(1998). Google Scholar
L. Kr,
“Accurate chequerboard corner localisation for camera calibration,”
Pattern Recognit. Lett., 32
(10), 1428
–1435
(2011). http://dx.doi.org/10.1016/j.patrec.2011.04.002 PRLEDG 0167-8655 Google Scholar
R. Juarez-Salazar et al.,
“Camera calibration by multiplexed phase encoding of coordinate information,”
Appl. Opt., 54 4895
–4906
(2015). http://dx.doi.org/10.1364/AO.54.004895 APOPAI 0003-6935 Google Scholar
R. Juarez-Salazar, L. N. Gaxiola and V. H. Diaz-Ramirez,
“Single-shot camera position estimation by crossed grating imaging,”
Opt. Commun., 382 585
–594
(2017). http://dx.doi.org/10.1016/j.optcom.2016.08.041 OPCOB8 0030-4018 Google Scholar
A. Herout, M. Dubská and J. Havel, Vanishing Points, Parallel Lines, Grids, 41
–54 Springer, London
(2013). Google Scholar
R. Juarez-Salazar, F. Guerrero-Sanchez and C. Robledo-Sanchez,
“Theory and algorithms of an efficient fringe analysis technology for automatic measurement applications,”
Appl. Opt., 54 5364
–5374
(2015). http://dx.doi.org/10.1364/AO.54.005364 APOPAI 0003-6935 Google Scholar
|